本文研究一个在大规模 LLM 强化学习里反复出现的问题:当一个训练 batch 同时混入多个历史策略版本生成的数据时,能否仍为 PPO 式更新写出显式的单调改进下界?
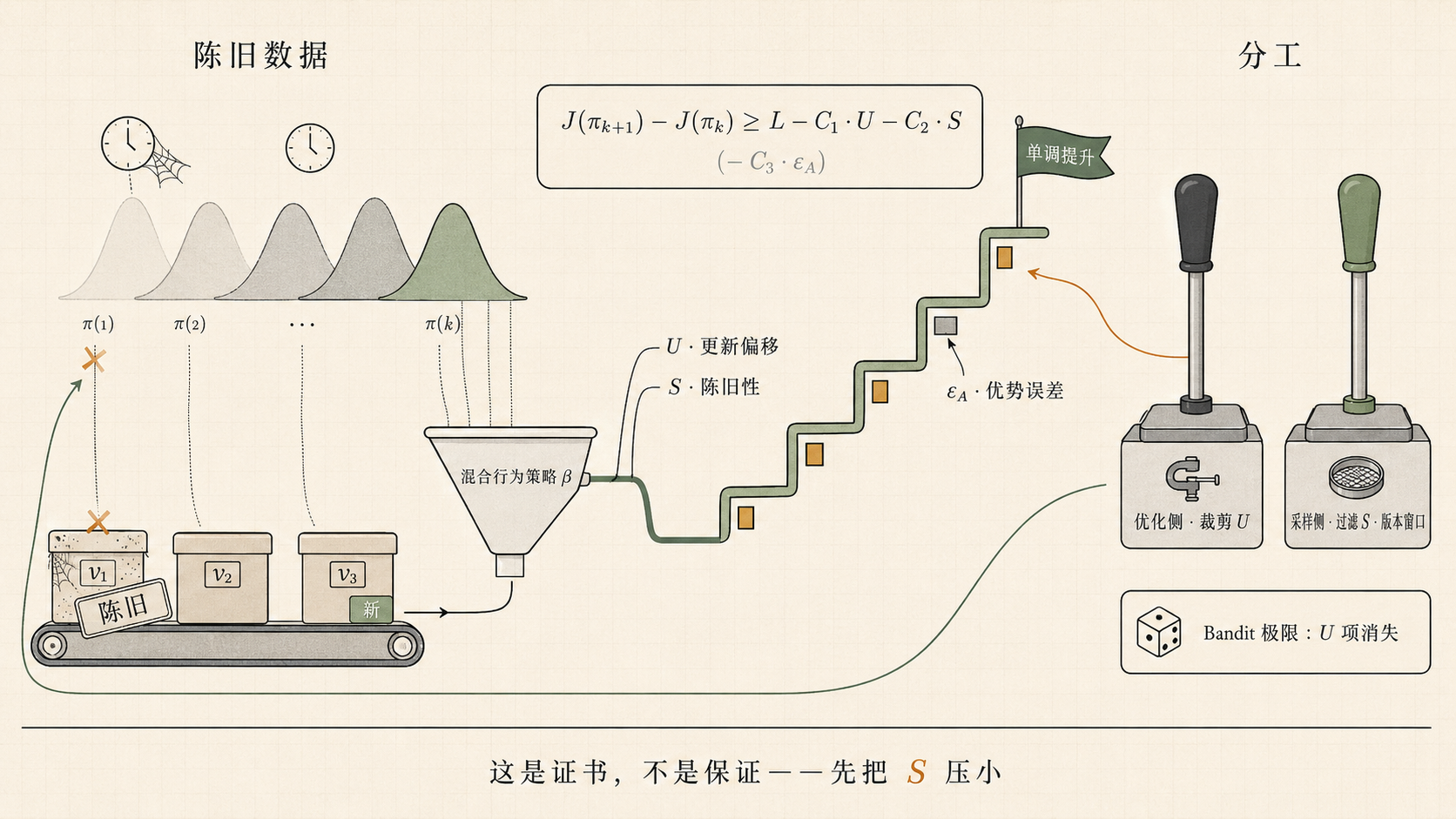
先说结论:在动态混合采样下,基础下界可以概括为”代理目标 - 更新偏移惩罚 - 采样陈旧性惩罚”;若把实际优势估计也纳入分析,还需要再减去一个优势替换误差项。
1. 引言:为什么要关心”异策略”训练?
用强化学习训练大语言模型,最直接的做法是同策略(on-policy)训练:模型生成一批数据,立刻用这批数据更新,再用更新后的模型采样下一批。
但在大规模分布式训练里,数百个 GPU 并行采样,模型更新本身也有延迟。新版本发布时,旧版本生成的数据往往还留在队列里:直接丢掉太浪费,继续使用又担心数据已经过时。
这就是异策略(off-policy)训练面对的核心问题:用旧策略采集的数据来更新新策略,什么条件仍足以保证一个可分析的单调提升下界?
最终会看到,这个下界由三部分共同决定:一个可最大化的代理目标、一个由优化侧裁剪控制的更新偏移惩罚、以及一个由采样侧过滤控制的陈旧性惩罚。
在不少 RLHF / online alignment 设定里,若把 prompt 看作 context、response 看作 action,并忽略长程环境状态演化,问题常被近似为 contextual bandit。本文仍先在一般折扣 MDP 上推导,是为了把”多版本行为策略混合、采样陈旧性、裁剪机制”这些结构一次性写清楚;到第六部分再看 bandit 化之后哪些地方会明显简化、哪些结论会保留。
相关工作已经搭好了这幅图景的很大一部分,这里先把继承关系交代清楚。GePPO 给出了复用近期多版本样本时的 policy improvement 下界,并且已经用三角不等式把风险拆成”更新偏移”与”沿相邻版本累积的陈旧性”两部分;它的 generalized clipping 会在第七部分以”方法一”的面目重新出现。Decoupled PPO 在 PPO 目标内部把 behavior policy 与 proximal policy 解耦;它的 decoupled objective 会以”方法二”的面目重新出现。系统侧,IMPALA/V-trace 是异步 actor-learner 训练中多版本 off-policy 修正的经典处理,AReaL、asynchronous RLHF 等近期 LLM-RL 系统工作则正运行在本文关心的陈旧性区间里。相对这条线,本文的增量主要是:(i) 用扩展 MDP 把轨迹级与步/段级(partial rollout 式)的动态混合写进同一套语言;(ii) 把 surrogate 锚定在各来源策略自身的优势上,从而让混合偏差项显式出现,并暴露步/段级混合特有的优势替代偏差;(iii) 显式的优势替换误差项;(iv) 把训推不一致当作有效陈旧性来处理。
也可以把这篇文章看成前一篇三策略视角文章的延伸:这里把行为侧从单一 $\mu$ 显式展开成历史策略混合 $\{\pi^{(i)}\}$,$\pi_k$ 与 $\pi_{k+1}$ 分别扮演当前参考策略与更新目标。即使没读过上一篇,也只需记住这里的核心思路:把当前更新可控的部分,和行为分布失配造成的部分分开分析。
1.1 本文讨论的异策略类型
为了避免把所有问题都称为”陈旧数据”,先把本文覆盖的理论错位拆开:
| 类型 | 数学形式 | 主要破坏的对象 |
|---|---|---|
| 版本陈旧 | 样本来自 $\pi_{k-m}$,更新目标是 $\pi_{k+1}$ | 行为分布与当前近端分布错位 |
| 行为-近端不一致 | $\mu \neq \pi_k$ | PPO ratio 分母不再等于真实采样分布 |
| 多轮样本复用 | 同一批样本被多个更新反复使用 | 后续 epoch 相对原采样分布逐渐 off-policy |
| 混合行为策略 | $\mu=\sum_i w_i\pi^{(i)}$ 或扩展状态中的 $\beta$ | batch 不是来自单一旧策略 |
| 支撑集不一致 | 存在 $\mu(a\mid s)=0,\pi(a\mid s)>0$ | importance ratio 不可定义 |
后文的下界主要处理前四类;第五类是所有重要性修正都必须先满足的基础假设,因此会单独作为支撑覆盖条件讨论。
2. 理论基础
2.1 基本设定
考虑一个标准的马尔可夫决策过程(MDP),包括状态空间 $\mathcal{S}$、动作空间 $\mathcal{A}$、转移概率 $p(s'\mid s,a)$、奖励函数 $r(s,a)$、初始状态分布 $\rho_0$ 和折扣因子 $\gamma \in (0,1)$。
对 LLM RL 来说,很多任务更接近有限视野的序列决策,而不是无限视野折扣 MDP。这里沿用折扣记号,是因为它与经典推导衔接最直接;同样的分解可以搬到有限视野版本,只是 $1/(1-\gamma)$ 因子会换成对视野长度的多项式依赖。
策略 $\pi$ 的期望累计折扣回报:
$$ J(\pi) := \mathbb{E}\left[\sum_{t=0}^{\infty} \gamma^t r(s_t, a_t) \mid \pi\right] $$
折扣状态访问分布
$$ d_\pi(s) := (1-\gamma) \sum_{t=0}^{\infty} \gamma^t \Pr(s_t = s \mid \pi) $$
优势函数
$$ A^\pi(s,a) := Q^\pi(s,a) - V^\pi(s) $$
全变差距离(TV 距离)
$$ D_{\mathrm{TV}}(\pi, \pi'; s) := \frac{1}{2} \sum_{a \in \mathcal{A}} |\pi(a \mid s) - \pi'(a \mid s)| $$
本文统一用 $\mid$ 表示条件概率(例如 $\pi(a\mid s)$),$\|\cdot\|$ 保留给范数。
2.2 核心工具:性能差分引理
全文的起点是经典的 performance difference lemma:把 $J(\pi)-J(\pi_k)$ 精确写成新策略占据分布下对旧策略优势的期望。这一恒等式可追溯到 Kakade-Langford 的分析,也是 TRPO 推导的起点。
引理 2.1(性能差分引理)
对任意旧策略 $\pi_k$ 和新策略 $\pi$,性能差异可写成:
$$ J(\pi) - J(\pi_k) = \frac{1}{1-\gamma} \mathbb{E}_{s \sim d_\pi}\left[ \mathbb{E}_{a \sim \pi(\cdot \mid s)}[A^{\pi_k}(s,a)] \right] $$
直观理解:新策略带来的改进,等于它自身访问到的状态分布下,按它选动作所得到的平均优势。
2.3 本文所有下界默认的理论条件
后文的每个下界都应理解为在若干标准条件下成立的结构性保证。为了不在每个定理里重复,先把核心假设列出来:
-
支撑覆盖(common support):若目标策略可能选择某动作,则行为策略也必须给它正概率。典型写法是
$$ \pi(a\mid s)>0 \Rightarrow \mu(a\mid s)>0. $$
在后文的混合场景里,这一条件要按来源逐个理解:凡是数据进入 loss 的行为策略 $\pi^{(i)}$,都需要覆盖目标策略 $\pi_{k+1}$ 的支撑;凡是用到比值 $\pi_k/\pi^{(i)}$ 的地方(如第七部分),还需要覆盖当前策略 $\pi_k$ 的支撑。
- 优势有界:存在常数 $A_{\max}$,使得 $|A^{\pi_k}(s,a)|\le A_{\max}$。这保证分布替换误差能被 TV / KL 类距离控制。
- 比率有界或被约束:重要性比率 $\pi(a\mid s)/\mu(a\mid s)$ 需要存在,并且在理论上不能任意大;若使用裁剪,则得到的是带偏的 surrogate,而不是原目标的无偏估计。
- 混合索引可定义:轨迹级混合中,每条轨迹的策略索引固定;若索引在 step/segment 级变化,需要额外建模 index transition。
- 优势替换误差可控:实际使用的 $\hat A$ 与下界中出现的参照优势(单策略采样时为 $A^{\pi_k}$,混合采样时为 $A^{\beta^{(k)}}$)之间需要有界偏差;第 5.4 节会单独讨论这一项。
这些假设不是技术细节,而是异策略理论能否成立的边界。特别是支撑覆盖一旦失败,importance ratio 本身就不再是合法对象。
3. 单策略采样的性能改进下界
3.1 分布不匹配与分布差异控制
性能差分引理有一个实际难题:右侧的期望是在新策略的状态分布 $d_\pi$ 下计算的,而我们只能从旧策略的分布 $d_{\pi_k}$ 中采样。
思路是:把期望分解成”旧分布下的期望”与”偏差项”两部分,再对偏差项加以控制。关键问题是:状态分布的差异与策略的差异之间有怎样的定量关系?
状态分布差异的控制
引理 3.1(状态分布差异与策略 TV 距离的关系)
$$ \|d_\pi - d_{\pi_k}\|_1 \leq \frac{2\gamma}{1-\gamma} \mathbb{E}_{s \sim d_{\pi_k}} \big[ D_{\mathrm{TV}}(\pi, \pi_k; s) \big] $$
这里采用的是 average-divergence / average-TV 风格的写法。它不是 TRPO 里更常见的 $\max_s D_{\mathrm{TV}}$ 版本,而更接近 CPO / Achiam et al. (2017) 那类”用平均散度刻画性能差距”的表述;这样写更容易落到样本平均,也更方便后文处理多源采样与陈旧性。关于从 $\|d_\pi-d_{\pi_k}\|_1$ 到 average TV 的 proof sketch 见附录 A。
物理意义
策略在动作空间上的微小差异,会被环境动力学”放大”成状态访问分布的差异。上式中的系数 $\frac{2\gamma}{1-\gamma}$ 反映了时间累积效应——在长时域任务里($\gamma$ 接近 1),放大效应更明显。
证明思路
证明通常从折扣访问分布的不动点方程出发,再配合 average-divergence 风格的性能界完成。本文的重点不在复现这条证明链,而在于如何把它推广到多源采样与陈旧数据场景,所以正文只保留思路,附录 A 给出一个简短的 proof sketch。
3.2 策略性能改进下界
定理 3.2(策略性能改进下界)
定义期望优势上界系数 $C_{\pi,\pi_k} := \max_{s} \lvert \mathbb{E}_{a \sim \pi}[A^{\pi_k}(s,a)] \rvert$,则:
$$ J(\pi) - J(\pi_k) \geq L_{\pi_k}(\pi) - \frac{2\gamma C_{\pi,\pi_k}}{(1-\gamma)^2} \mathbb{E}_{s \sim d_{\pi_k}} \big[ D_{\mathrm{TV}}(\pi, \pi_k; s) \big] $$
其中代理目标为:
$$ L_{\pi_k}(\pi) := \frac{1}{1-\gamma} \mathbb{E}_{s \sim d_{\pi_k}, a \sim \pi_k} \left[ \frac{\pi(a \mid s)}{\pi_k(a \mid s)} A^{\pi_k}(s,a) \right] $$
这里的 $L_{\pi_k}(\pi)$ 省略了与 $\pi$ 无关的常数项 $J(\pi_k)$;若写成更接近 TRPO 教科书的形式,就是 $J(\pi_k)+L_{\pi_k}(\pi)$。另外,$C_{\pi,\pi_k}$ 本身依赖新策略 $\pi$,所以它更像一个出现在下界表达式中的结构性系数,不宜在实践里直接当作固定超参数。
这个下界由两部分组成:
-
代理目标 $L_{\pi_k}(\pi)$:可通过旧策略数据用重要性采样直接估计,它是 TRPO 的经典 surrogate,也是 PPO clipped / penalized 目标的出发点。
-
策略偏移惩罚:随着新旧策略 TV 距离的增大而增加,这解释了为何 PPO 等算法需要限制更新幅度。
核心结论:这条定理给出了一个显式的改进下界;当右侧为正时,就能保证性能改进。
3.3 LLM 有限序列形式与支撑集条件
若把 LLM-RL 写成 prompt-response 形式,令 prompt 为 $x$、回复为
$$ y=(a_1,\ldots,a_T), $$
行为策略与目标策略的序列概率为
$$ \mu(y\mid x)=\prod_{t=1}^T \mu(a_t\mid x,a_{<t}), \qquad \pi(y\mid x)=\prod_{t=1}^T \pi(a_t\mid x,a_{<t}). $$
对应的序列级重要性比率是
$$ \rho(y\mid x)=\frac{\pi(y\mid x)}{\mu(y\mid x)} =\prod_{t=1}^T \frac{\pi(a_t\mid x,a_{<t})}{\mu(a_t\mid x,a_{<t})}. $$
因此
$$ \log \rho(y\mid x) = \sum_{t=1}^T \left[\log \pi(a_t\mid x,a_{<t})-\log \mu(a_t\mid x,a_{<t})\right]. $$
这说明 token 级 log-ratio 的小偏差会沿序列线性累积,而 sequence ratio 本身会以乘积形式放大。长回复、低概率 token、截断采样和 MoE routing 都会让这个比率更容易重尾化。
这里还暴露出一个基础条件:如果某个 token 在行为策略下被 top-$k$ / top-$p$ / mask / EOS 规则置为零概率,而目标策略仍给它正概率,那么 $\rho$ 不可定义。此时不能简单说”加一个 importance ratio 即可修正”;理论上必须重新定义目标支持集,或引入能保证 common support 的平滑 / 混合分布。
4. 多策略静态混合采样
4.1 问题设定与统一建模(静态混合)
实际训练中,一个批次的数据可能来自多个策略版本 $\{\pi^{(1)}, \ldots, \pi^{(M)}\}$,各版本占比分别为 $\alpha_1, \ldots, \alpha_M$。如何把定理 3.2 推广到这种情形?
核心思想:扩展状态空间
做法很直接:把策略版本索引并入状态空间。
为什么要造这个空间?混合采样的麻烦在于,”这条数据是谁生成的”这一信息游离在 MDP 之外:同一个状态 $s$ 下,来自 $\pi^{(1)}$ 的样本和来自 $\pi^{(9)}$ 的样本服从完全不同的动作分布,单看 $s$ 无法区分。把版本索引 $i$ 并进状态之后,”谁生成的”就成了状态本身的一部分:在扩展空间上,混合行为重新变回一个普通的马尔可夫策略,第三部分针对”单一行为策略”证明的所有结论都能原样搬过来,不需要发明任何新定理。
定义扩展状态空间 $\tilde{\mathcal{S}} := \mathcal{S} \times \mathcal{I}$,其中 $\mathcal{I} = \{1, \ldots, M\}$ 是策略索引集合。在扩展状态 $(s, i)$ 下,混合行为策略定义为 $\beta(a \mid s, i) := \pi^{(i)}(a \mid s)$。
索引的演化由索引转移核 $q(i' \mid i)$ 刻画。扩展 MDP 继承原始 MDP 的奖励和环境转移,索引按 $q(i'\mid i)$ 独立演化。
这个技巧之所以有效,是因为新策略 $\pi$ 在扩展 MDP 上的回报与原始 MDP 中的回报相同,因此可直接套用定理 3.2。
4.2 轨迹级混合:结构简化与改进下界
最常见的情形是每条轨迹只使用一个旧策略:在轨迹开始时采样索引 $I_0 \sim \alpha$,整条轨迹都用策略 $\pi^{(I_0)}$。此时索引转移核为恒等转移:$q(i' \mid i) = \mathbf{1}_{i'=i}$。
工程上,许多异步 actor-learner 架构中,采样端若按”整条轨迹归属于某个策略快照”的方式组织数据,learner 再混合使用不同版本的整条轨迹更新,这就大致对应这里的轨迹级混合。之所以说”大致”,是因为不同系统对”轨迹 / 采样单元”的切分边界未必完全一致。
引理 4.1(轨迹级混合的结构简化)
(a) 扩展状态访问分布分解为:$d_{\beta}(s, i) = \alpha_i \cdot d_{\pi^{(i)}}(s)$
(b) 优势函数还原为:$A^{\beta}((s, i), a) = A^{\pi^{(i)}}(s, a)$
(b) 的直观理解:由于索引永不变,从扩展状态 $(s,i)$ 出发的所有未来轨迹都由同一个策略 $\pi^{(i)}$ 生成。因此未来的累计回报完全由 $\pi^{(i)}$ 决定,价值函数和优势函数自然还原为 $\pi^{(i)}$ 的对应量。
混合策略的回报也就是各旧策略回报的加权平均:$J_{\mathrm{mix}} = \sum_{i=1}^{M} \alpha_i J(\pi^{(i)})$。
改进下界
推论 4.2(轨迹级混合的性能改进下界)
$$ J(\pi) - \sum_{i=1}^{M} \alpha_i J(\pi^{(i)}) \geq \sum_{i=1}^{M} \alpha_i L_{\pi^{(i)}}(\pi) - \frac{2\gamma \max_i C_{\pi, \pi^{(i)}}}{(1-\gamma)^2} \sum_{i=1}^{M} \alpha_i \mathbb{E}_{s \sim d_{\pi^{(i)}}} \big[ D_{\mathrm{TV}}(\pi, \pi^{(i)}; s) \big] $$
这里取 $\max_i C_{\pi,\pi^{(i)}}$ 只是为了写得更紧凑;更细致的写法是让每个分量各自带自己的 $C_i$ 再加权求和。也就是说,这里牺牲了一点紧度,换来更统一的展示形式。
结论是:只要对每条轨迹用对应旧策略的重要性比率构造损失,并控制新策略与各旧策略的偏移,混合训练就仍有明确的改进下界。
5. 动态混合采样与单调提升条件
5.1 问题与统一建模(动态混合)
上一节讨论的是静态混合——混合权重 $\alpha_i$ 固定不变。本节考虑更一般的动态混合——新策略发布后,采样逐步由新策略接管的过程。
前面的结论刻画了”新策略相对于混合行为策略”的改进。但实际训练中真正关心的是:每轮更新后的最新策略 $\pi_{k+1}$ 相对于上一轮的 $\pi_k$ 是否单调提升?
$$ J(\pi_{k+1}) \geq J(\pi_k) $$
统一建模框架
动态混合采样的两种典型形式都可以用索引转移核 $q(i'\mid i)$ 统一刻画:
轨迹级混合(对应常规异步训练的一种抽象;索引恒等转移):$q(i'\mid i) = \mathbf{1}\{i'=i\}$
步/段级混合(partial rollout,也可理解为段式采样的一种抽象;允许切换):$q(i'\mid i) = (1-\sigma(i))\mathbf{1}\{i'=i\} + \sigma(i)\kappa(i'\mid i)$
其中 $\sigma(i)$ 是切换概率,$\kappa(\cdot\mid i)$ 是目标索引分布。
5.2 分解与单调提升下界
记第 $k$ 轮采样对应的混合行为策略为 $\beta^{(k)}$——即第四部分的 $\beta$,配上该轮的索引初始分布 $\alpha^{(k)}$ 与索引转移核 $q$——并令混合回报 $J_{\mathrm{mix}}^{(k)} := J(\beta^{(k)})$ 为它在扩展 MDP 上的回报。以混合回报为中间桥梁,性能差异可以分解为:
$$ J(\pi_{k+1}) - J(\pi_k) = \underbrace{[J(\pi_{k+1}) - J_{\mathrm{mix}}^{(k)}]}_{\text{相对混合策略的改进}} + \underbrace{[J_{\mathrm{mix}}^{(k)} - J(\pi_k)]}_{\text{混合偏差项}} $$
第一项可以在扩展 MDP 上直接套用定理 3.2。第二项是混合偏差项。轨迹级混合时,可以把它写成各个 $J(\pi^{(i)}) - J(\pi_k)$ 的加权和再逐项控制,但这个展开依赖引理 4.1,只在索引永不切换时成立。对任意索引转移核 $q$ 都行得通的做法,是在扩展 MDP 上直接使用性能差分引理——把 $\beta^{(k)}$ 当”新策略”、把提升到扩展空间的 $\pi_k$ 当”旧策略”。提升后的 $\pi_k$ 不看索引、索引又自行演化,所以它的价值与优势都不依赖 $i$,引理给出精确等式
$$ J_{\mathrm{mix}}^{(k)} - J(\pi_k) = \frac{1}{1-\gamma}\, \mathbb{E}_{(s,i)\sim d_{\beta^{(k)}}}\Big[\mathbb{E}_{a\sim \pi^{(i)}(\cdot\mid s)}\big[A^{\pi_k}(s,a)\big]\Big]. $$
再由 $\mathbb{E}_{a\sim\pi_k}[A^{\pi_k}(s,a)]=0$,内层期望的绝对值不超过 $2\|A^{\pi_k}\|_\infty\, D_{\mathrm{TV}}(\pi^{(i)}, \pi_k; s)$,于是得到:
$$ J_{\mathrm{mix}}^{(k)} - J(\pi_k) \geq -\frac{2\|A^{\pi_k}\|_\infty}{1-\gamma} \mathbb{E}_{(s,i)\sim d_{\beta^{(k)}}} \big[ D_{\mathrm{TV}}(\pi^{(i)}, \pi_k; s) \big] $$
单调提升下界
合并以上结果,得到核心定理:
定理 5.1(动态混合采样下的单调提升下界)
$$ \begin{aligned} J(\pi_{k+1}) - J(\pi_k) \geq\;& L_{\beta^{(k)}}(\pi_{k+1}) \\ &- \frac{2\gamma C_{\pi_{k+1},\beta^{(k)}}}{(1-\gamma)^2} \mathbb{E}_{(s,i)\sim d_{\beta^{(k)}}} \big[ D_{\mathrm{TV}}(\pi_{k+1}, \pi^{(i)}; s) \big] \\ &- \frac{2\|A^{\pi_k}\|_\infty}{1-\gamma} \mathbb{E}_{(s,i)\sim d_{\beta^{(k)}}} \big[ D_{\mathrm{TV}}(\pi^{(i)}, \pi_k; s) \big] \end{aligned} $$
其中 $L_{\beta^{(k)}}(\pi_{k+1})$ 表示”相对行为策略 $\beta^{(k)}$ 的代理目标”(与第三部分的 $L_{\pi_k}(\pi)$ 同形,只是把行为策略从单一 $\pi_k$ 推广到混合 $\beta^{(k)}$)。
更具体地,可写为
$$ L_{\beta^{(k)}}(\pi_{k+1}) := \frac{1}{1-\gamma} \mathbb{E}_{(s,i)\sim d_{\beta^{(k)}},\, a\sim \pi^{(i)}(\cdot\mid s)}\left[\frac{\pi_{k+1}(a\mid s)}{\pi^{(i)}(a\mid s)}\,A^{\beta^{(k)}}((s,i),a)\right]. $$
类似地,记
$$ C_{\pi_{k+1},\beta^{(k)}} := \max_{(s,i)}\left|\mathbb{E}_{a\sim \pi_{k+1}(\cdot\mid s)}\big[A^{\beta^{(k)}}((s,i),a)\big]\right|. $$
下界里有两个惩罚项,对应双重控制:
- 更新偏移惩罚:新策略 $\pi_{k+1}$ 相对于采样来源策略 $\pi^{(i)}$ 的偏移;
- 采样陈旧性惩罚:采样来源策略 $\pi^{(i)}$ 相对于当前策略 $\pi_k$ 的陈旧性。
5.3 直接约束为何不可行:三角不等式分解
先加一句限定:下面讨论的不可行性针对的是”试图对每个历史来源都施加统一硬 trust-region 约束”这种解释,并不等于说 PPO-Clip 本身显式实现了这样的约束。
定理 5.1 中的更新偏移惩罚项看起来可以通过约束 $D_{\mathrm{TV}}(\pi_{k+1}, \pi^{(i)}; s)$ 控制;但若把它理解成上述统一硬约束,就会撞上一个实际的不可行性问题:
观察 5.2(统一硬 trust-region 的不可行性)
设混合采样包含两个旧策略 $\pi^{(1)}$ 和 $\pi^{(2)}$,若存在某个状态 $s$ 使得 $D_{\mathrm{TV}}(\pi^{(1)}, \pi^{(2)}; s) > 2\delta$,则不存在任何策略 $\pi_{k+1}$ 能同时满足 $D_{\mathrm{TV}}(\pi_{k+1}, \pi^{(1)}; s) \leq \delta$ 和 $D_{\mathrm{TV}}(\pi_{k+1}, \pi^{(2)}; s) \leq \delta$。
证明
由三角不等式,若同时满足这两个约束,则 $D_{\mathrm{TV}}(\pi^{(1)}, \pi^{(2)}; s) \leq 2\delta$,矛盾。
问题根源
更新偏移惩罚项把 $\pi_{k+1}$ 与历史策略族 $\{\pi^{(i)}\}$ 直接耦合,而后者的内部结构是历史训练的产物,不受当前更新控制。
三角不等式分解
解法是利用 TV 距离的三角不等式:
$$ D_{\mathrm{TV}}(\pi_{k+1}, \pi^{(i)}; s) \leq D_{\mathrm{TV}}(\pi_{k+1}, \pi_k; s) + D_{\mathrm{TV}}(\pi_k, \pi^{(i)}; s) $$
把耦合约束拆成两个独立部分:
- 更新增量偏移 $D_{\mathrm{TV}}(\pi_{k+1}, \pi_k; s)$:新策略相对于当前策略的偏离,由优化侧控制;
- 采样陈旧性 $D_{\mathrm{TV}}(\pi_k, \pi^{(i)}; s)$:当前策略相对于各旧策略的偏离,由采样侧控制。
读过三策略那篇的读者应该会觉得眼熟:下面的 $U_k$ 与 $S_k$ 正是那篇 $\alpha_0$ 与 $\alpha_1$ 的 average-TV、多版本对应物——同样的两类失配来源,只是行为侧展开成了带版本索引的策略族。GePPO 里也有同一步三角不等式,只不过它把陈旧性那条腿进一步展开成相邻版本间 TV 距离的累加。
定义:
$$ U_k := \mathbb{E}_{(s,i)\sim d_{\beta^{(k)}}} \big[D_{\mathrm{TV}}(\pi_{k+1}, \pi_k; s)\big], \quad S_k := \mathbb{E}_{(s,i)\sim d_{\beta^{(k)}}} \big[D_{\mathrm{TV}}(\pi_k, \pi^{(i)}; s)\big] $$
推论 5.3(分解后的单调提升下界)
$$ J(\pi_{k+1}) - J(\pi_k) \geq L_{\beta^{(k)}}(\pi_{k+1}) - \frac{2\gamma C_{\pi_{k+1},\beta^{(k)}}}{(1-\gamma)^2} U_k - \left( \frac{2\gamma C_{\pi_{k+1},\beta^{(k)}}}{(1-\gamma)^2} + \frac{2\|A^{\pi_k}\|_\infty}{1-\gamma} \right) S_k $$
为什么分解能解决问题?
关键在于:分解后的 $U_k$ 只涉及新策略 $\pi_{k+1}$ 和当前策略 $\pi_k$,与旧策略族 $\{\pi^{(i)}\}$ 的结构完全无关。因此无论旧策略之间差异多大,约束 $U_k$ 都是可行的——这正是观察 5.2 不可行性问题的解法。
对应的理论原则就是职责分离:
| 控制项 | 理论含义 | 负责方 | 控制机制 |
|---|---|---|---|
| $U_k$(更新增量偏移) | $\pi_{k+1}$ 相对 $\pi_k$ 的偏移 | 优化算法 | 策略裁剪 |
| $S_k$(采样陈旧性) | 行为策略族相对 $\pi_k$ 的偏移 | 采样系统 | 数据过滤、版本窗口 |
证书何时非空?
推论 5.3 还有一层值得强调的读法。这个下界是一张充分条件式的证书:右端为正时,改进有保证。单策略情形下证书总能做到非空——取 $\pi_{k+1}=\pi_k$,代理目标与惩罚项同时归零,右端恰为 0;沿最大化右端的方向走,至少总能认证”不退化”。混合场景里这层保底没有了:取 $\pi_{k+1}=\pi_k$ 只能让 $U_k=0$,$S_k$ 的两项还在。数据足够陈旧时,右端可能对所有候选 $\pi_{k+1}$ 都为负,证书什么也证明不了。这正是”采样侧必须先把 $S_k$ 压回可用范围(数据过滤、版本窗口),优化侧的裁剪才有东西可保”的理论依据。GePPO 走的是互补路线:按数据的期望年龄收缩裁剪半径,让优化侧吞下陈旧性预算;第 7.4 节会回到这组权衡。
5.4 优势替换误差:异策略不只是 ratio 问题
上面的下界默认 surrogate 使用理论优势:第三部分单策略下界里是 $A^{\pi_k}(s,a)$,本节混合下界里是 $A^{\beta^{(k)}}((s,i),a)$(轨迹级混合时即 $A^{\pi^{(i)}}(s,a)$)。但在 LLM-RL 中,实际进入 loss 的往往是批次估计量、critic / GAE、verifier reward 的归一化,或 group-relative advantage。记下界所要求的参照优势为 $A^{\mathrm{ref}}$、实际使用的优势为 $\hat A$、行为分布为 $\mu$,则即使 importance ratio 写对了,也还会出现优势替换误差:
$$ \mathbb{E}_{\mu}\left[\rho(s,a)\hat A(s,a)\right] - \mathbb{E}_{\mu}\left[\rho(s,a)A^{\mathrm{ref}}(s,a)\right] = \mathbb{E}_{\mu}\left[\rho(s,a)(\hat A(s,a)-A^{\mathrm{ref}}(s,a))\right]. $$
若假设 $|\rho(s,a)|\le M$ 且 $|\hat A(s,a)-A^{\mathrm{ref}}(s,a)|\le \epsilon_A$,则有
$$ \left| \mathbb{E}_{\mu}\left[\rho(s,a)(\hat A(s,a)-A^{\mathrm{ref}}(s,a))\right] \right| \le M\epsilon_A. $$
这里有一个容易被忽略的实践细节:流水线里常用当前 critic 估计优势,即 $\hat A \approx A^{\pi_k}$,而混合下界要的是 $A^{\beta^{(k)}}$。此时误差可以拆成 $(\hat A - A^{\pi_k}) + (A^{\pi_k} - A^{\beta^{(k)}})$:前一半是估计质量问题,后一半又是一种陈旧性效应——它随 $\pi_k$ 与各来源策略的距离增大,在 on-policy 极限下消失。
因此,异策略误差至少包含三类:目标更新漂移 $U_k$、行为采样陈旧性 $S_k$、以及优势替换误差 $\epsilon_A$。只讨论 actor ratio 会漏掉第三项;在理论上,$\hat A$ 是否仍接近 $A^{\mathrm{ref}}$ 是单调提升条件的一部分。
6. 轨迹级与步/段级混合的比较
6.1 机制差异与估计影响
两类混合机制的本质区别在于索引转移核的结构:
- 轨迹级混合:$q(i'\mid i) = \mathbf{1}\{i'=i\}$,索引永不改变;
- 步/段级混合:$\sigma(i) > 0$,允许轨迹内切换。
与常见工程术语的对应关系:
- 轨迹级混合可大致理解为常规异步训练的理想化抽象:数据按整条轨迹 / episode 归属于某个策略版本;
- 步/段级混合可大致理解为 partial rollout(段式采样) 的抽象:由于 actor 与 learner 异步,段边界处可能刷新到新策略版本,用索引转移核允许”轨迹内部版本切换”,可以更贴切地刻画这种现象。APRIL 提供了这类系统设计的一个代表性例子,但它的主要贡献是缓解长尾 rollout 的系统瓶颈,而不是给出本文所需的单调改进理论。
关键分水岭在于引理 4.1 的结构简化是否成立:轨迹级混合满足优势函数还原;步/段级混合一般不满足,因为未来回报会受索引转移核影响。
采样陈旧性 $S_k$ 的差异
轨迹级混合的陈旧性来源于:混合权重 $\alpha_i^{(k)}$ 在新策略发布后仍对旧策略保留一定比例。
步/段级混合在一个简化模型下具有指数压缩效应:设索引一旦从旧版本切到新版本就不再切回,每一步以概率 $\sigma$ 完成切换,则折扣访问分布下旧索引的边缘质量为
$$ (1-\gamma)\sum_{t=0}^{\infty}[\gamma(1-\sigma)]^t = \frac{1-\gamma}{1-\gamma(1-\sigma)}. $$
只要 $\sigma \gg 1-\gamma$,旧策略的权重就会被明显压缩。
代理目标估计的差异
轨迹级混合:优势函数还原为 $A^{\pi^{(i)}}(s,a)$,估计路径清晰。
步/段级混合的优势替代偏差:若沿用单策略优势估计,会产生系统性偏差。原因是 $A^{\beta^{(k)}}((s,i),a)$ 需要对未来索引切换取期望,而 $A^{\pi^{(i)}}(s,a)$ 隐含了”未来始终沿用 $\pi^{(i)}$”的假设。
Bandit 设定下的统一
在单步 episode 的 LLM 训练中没有后续状态转移,$A^{\beta^{(k)}}$ 精确还原为 $A^{\pi^{(i)}}$,两类机制的估计问题就此重合。至于这个极限下还有哪些东西会跟着简化,见 6.3 节。
6.2 风险与适用场景
步/段级混合还有一个隐患:即使单步重要性比值被裁剪,长轨迹下多步噪声叠加仍会放大梯度估计方差。每次更新的策略变化幅度较大时,轨迹内部的”行为突变”可能引出更重尾的比值分布。这也是下表中”每次更新策略变化幅度大”场景推荐轨迹级混合的原因。
适用场景
两类混合机制的适用场景
| 场景特征 | 推荐机制 | 理由 |
|---|---|---|
| 长轨迹、高频更新、强异步 | 步/段级 | 可显著压缩 $S_k$ |
| 短轨迹(非Bandit) | 轨迹级 | 生成完成快,陈旧性来不及累积 |
| 每次更新策略变化幅度大 | 轨迹级 | 避免方差放大 |
| 单步episode(Bandit) | 均可 | 按实现便利选择 |
| 需要折中方案 | 段级 | 在自然边界切换 |
核心权衡:步/段级混合在采样侧更强(快速去陈旧),轨迹级混合在估计侧更稳(代理目标更容易估计)。
6.3 Bandit 极限:哪些项消失,哪些保留
引言里承诺过回到 contextual bandit 视角,这里把线索收拢。把 prompt $x\sim\rho_0$ 看作状态、整条 response $y$ 看作单个动作(即 3.3 节的序列级视角),每个 episode 恰好只有一次决策。在这种单步 episodic 归一化下,$1/(1-\gamma)$ 前置因子会消失,下文一律省略。
真正起作用的结构性事实只有一个:状态分布不再依赖策略——所有策略面对同一个 prompt 分布 $\rho_0$。由此:
-
更新偏移惩罚整体消失。 定理 3.2 的惩罚项之所以存在,是因为 $d_\pi \neq d_{\pi_k}$;当 $d_\pi \equiv \rho_0$ 时 surrogate 变得精确。在支撑覆盖成立时,重要性采样给出无偏恒等式
$$ J(\pi_{k+1}) - J_{\mathrm{mix}}^{(k)} = \mathbb{E}_{x\sim\rho_0,\; i,\; y\sim \pi^{(i)}(\cdot\mid x)}\left[\frac{\pi_{k+1}(y\mid x)}{\pi^{(i)}(y\mid x)}\,A^{\beta^{(k)}}((x,i),y)\right], $$
右端没有任何惩罚项。
- 陈旧性惩罚退化为常数偏置。 $J_{\mathrm{mix}}^{(k)} - J(\pi_k)$ 不含 $\pi_{k+1}$,比较不同候选更新时会互相抵消。由于 surrogate 对任意目标都精确,单调提升条件化简成一句干净的话:$L_{\beta^{(k)}}(\pi_{k+1}) > L_{\beta^{(k)}}(\pi_k)$——超过”原地不动”的代理目标值,就有改进。陈旧性不再威胁下界的有效性。
- 裁剪的角色变了。 在精确期望层面,已经没有什么强迫我们维持 trust region;继续裁剪或过滤的理由变成有限样本层面的:3.3 节的序列级比率是重尾的,来源越陈旧尾越重。更新偏移与陈旧性以方差问题的形式活下来,而不再是下界里的偏差项。
- 原样保留的部分。 支撑条件(3.3 节)、优势替换误差 $\epsilon_A$(5.4 节)、第八部分的训推不一致都还在——它们本来就不是长程状态漂移带来的。
一句话总结:两个惩罚项是折扣 MDP 这套机器造出来的;bandit 极限保留了记账(谁采的样、概率是多少),但把改进问题变成了纯粹的估计问题。
7. 裁剪机制的理论基础
7.1 从 TV 距离到样本可控量
推论 5.3 告诉我们,要保证单调提升,需要控制更新增量偏移 $U_k = \mathbb{E}[D_{\mathrm{TV}}(\pi_{k+1}, \pi_k; s)]$。但 TV 距离是分布层面的量,如何用样本来控制?
连接理论和样本的是下面这个恒等式:
引理 7.1(TV 距离的比值差表示)
设策略 $\pi_1$ 的支撑覆盖 $\pi$ 和 $\pi_2$ 的支撑,则对任意状态分布 $\mu$:
$$ \mathbb{E}_{s\sim \mu} \big[D_{\mathrm{TV}}(\pi, \pi_2; s)\big] = \frac{1}{2} \mathbb{E}_{s\sim \mu, a\sim\pi_1(\cdot\mid s)} \left| \frac{\pi(a\mid s)}{\pi_1(a\mid s)} - \frac{\pi_2(a\mid s)}{\pi_1(a\mid s)} \right| $$
这个恒等式并非本文首创:它就是 GePPO 分析里的主力工具(其 Lemma 3),这里只是用混合记号重述。另外注意:这里默认作为分母的行为策略在参与训练的动作上具有支撑覆盖。对 LLM 来说,这意味着若推理端使用带硬截断的 top-k / top-p 采样而不做平滑,一些比值可能根本无定义;第 8 节会回到这个问题。
直观理解
左侧是两个分布之间的 TV 距离(要遍历所有动作),右侧是在 $\pi_1$ 下采样时两个重要性比值之差的绝对值。这样就能用样本估计和控制 TV 距离。
$U_k$ 的样本表示
利用引理 7.1,取 $\pi = \pi_{k+1}$,$\pi_2 = \pi_k$,$\pi_1 = \pi^{(i)}$(采样来源策略),可得:
$$ U_k = \frac{1}{2} \mathbb{E}_{(s,i) \sim d_{\beta^{(k)}}, a \sim \pi^{(i)}(\cdot\mid s)} \left| \frac{\pi_{k+1}(a\mid s)}{\pi^{(i)}(a\mid s)} - \frac{\pi_k(a\mid s)}{\pi^{(i)}(a\mid s)} \right| $$
记 $\rho_{k+1} := \frac{\pi_{k+1}(a\mid s)}{\pi^{(i)}(a\mid s)}$ 和 $\rho_k := \frac{\pi_k(a\mid s)}{\pi^{(i)}(a\mid s)}$,则:
$$ U_k = \frac{1}{2} \mathbb{E}_{(s,i,a) \sim \text{训练数据}} \big| \rho_{k+1} - \rho_k \big| $$
这意味着:若在理论上硬性要求每个样本都满足 $\lvert\rho_{k+1} - \rho_k\rvert \leq \epsilon$,就能保证 $U_k \leq \epsilon/2$。
7.2 约束 $U_k$:两种裁剪方式
方法一:直接约束比值差
对每个样本 $(s, i, a)$ 要求:
$$ \left| \frac{\pi_{k+1}(a\mid s)}{\pi^{(i)}(a\mid s)} - \frac{\pi_k(a\mid s)}{\pi^{(i)}(a\mid s)} \right| \leq \epsilon $$
即裁剪区间为 $\left[\frac{\pi_k(a\mid s)}{\pi^{(i)}(a\mid s)} - \epsilon, \frac{\pi_k(a\mid s)}{\pi^{(i)}(a\mid s)} + \epsilon\right]$,裁剪中心是 $\rho_k$ 而不是 1。
先把出处说清楚:这正是 GePPO 的 generalized clipping(其 Definition 1)——对 $\pi_{k+1}/\pi^{(i)}$ 以 $\pi_k/\pi^{(i)}$ 为中心做加性 $\pm\epsilon$ 裁剪,数据 on-policy($\pi^{(i)}=\pi_k$)时退回标准 PPO 裁剪。保留”方法一”这个中性名字,只是为了与后文对称。
方法二:约束增量比值
注意到 $\rho_{k+1} - \rho_k = \rho_k \cdot \left(\frac{\pi_{k+1}}{\pi_k} - 1\right)$,所以
$$ |\rho_{k+1} - \rho_k| = \rho_k \cdot \left|\frac{\pi_{k+1}(a\mid s)}{\pi_k(a\mid s)} - 1\right| $$
如果进一步在理论上硬性约束 $\left\lvert\frac{\pi_{k+1}(a\mid s)}{\pi_k(a\mid s)} - 1\right\rvert \leq \epsilon$,两边取期望,得 $\mathbb{E}[|\rho_{k+1} - \rho_k|] \leq \epsilon\,\mathbb{E}_{a\sim\pi^{(i)}}[\rho_k] = \epsilon$,因此 $U_k \leq \epsilon/2$。
这种方法直接对 $\pi_{k+1}/\pi_k$ 以 1 为中心裁剪,裁剪约束本身不依赖旧策略 $\pi^{(i)}$。但若采用后文的 $\hat{A}=\rho_k\cdot A^{\beta^{(k)}}$,仍需要每条样本的行为概率 $\pi^{(i)}(a\mid s)$(或记录的 logprob)来计算 $\rho_k$。
方法二同样不是新东西:由于 $\rho_k \ge 0$ 可以自由进出 $\min$,下文的 clipped surrogate $L^{\mathrm{M2}}$ 与 Decoupled PPO 的 decoupled clipped objective 逐项相同(proximal policy 取 $\pi_k$、behavior policy 取 $\pi^{(i)}$);AReaL 在异步 LLM RL 里部署的正是这个目标。
先强调一点:上面两条都是理论上的逐样本硬约束。下面写出的 clipped surrogate 只是实践中的近似实现,目的是把 $U_k$ 控制在可接受的范围内,而不是让每一步优化都自动满足严格保证。
目标函数(三种裁剪机制)
为便于对比,下面给出三种裁剪机制的完整目标函数。设当前样本来自旧策略 $\pi^{(i)}$,记:
- $\rho_{k+1} = \frac{\pi_{k+1}(a\mid s)}{\pi^{(i)}(a\mid s)}$(新策略相对采样策略的比值);
- $\rho_k = \frac{\pi_k(a\mid s)}{\pi^{(i)}(a\mid s)}$(当前策略相对采样策略的比值);
- $r = \frac{\pi_{k+1}(a\mid s)}{\pi_k(a\mid s)}$(新策略相对当前策略的增量比值)。
说明:若是轨迹级混合(索引不变),则 $A^{\beta^{(k)}}((s,i),a)=A^{\pi^{(i)}}(s,a)$,可直接用每条轨迹对应旧策略的优势估计;若是步/段级混合,直接用 $A^{\pi^{(i)}}$ 代替 $A^{\beta^{(k)}}$ 会引入优势替代偏差(第六部分详述),需要用能反映未来索引切换的优势 / 价值估计。
标准 PPO(轨迹级混合时)
以 1 为中心裁剪 $\rho_{k+1}$
$$ L^{\mathrm{PPO}} = \mathbb{E} \left[ \min\left( \rho_{k+1} \cdot A^{\pi^{(i)}}, \; \mathrm{clip}(\rho_{k+1}, 1-\epsilon, 1+\epsilon) \cdot A^{\pi^{(i)}} \right) \right] $$
方法一
以 $\rho_k$ 为中心裁剪 $\rho_{k+1}$
$$ L^{\mathrm{M1}} = \mathbb{E} \left[ \min\left( \rho_{k+1} \cdot A^{\beta^{(k)}}, \; \mathrm{clip}(\rho_{k+1}, \rho_k-\epsilon, \rho_k+\epsilon) \cdot A^{\beta^{(k)}} \right) \right] $$
方法二
以 1 为中心裁剪增量比值 $r$
$$ L^{\mathrm{M2}} = \mathbb{E} \left[ \min\left( r \cdot \hat{A}, \; \mathrm{clip}(r, 1-\epsilon, 1+\epsilon) \cdot \hat{A} \right) \right] $$
其中 $\hat{A} = \rho_k \cdot A^{\beta^{(k)}}$ 是经过重要性加权的优势估计。
7.3 方法对比与选型
三种裁剪机制的对比
| 方法 | 裁剪变量 | 裁剪中心 | 裁剪区间 | 更自然对应的偏移对象 | 出处 |
|---|---|---|---|---|---|
| 标准PPO | $\rho_{k+1} = \pi_{k+1}/\pi^{(i)}$ | $1$ | $[1-\epsilon, 1+\epsilon]$ | $\pi_{k+1}$ 相对 $\pi^{(i)}$ 的偏移 | PPO(Schulman et al.) |
| 方法一 | $\rho_{k+1} = \pi_{k+1}/\pi^{(i)}$ | $\rho_k = \pi_k/\pi^{(i)}$ | $[\rho_k-\epsilon, \rho_k+\epsilon]$ | $\pi_{k+1}$ 相对 $\pi_k$ 的偏移 | GePPO 的 generalized clipping |
| 方法二 | $r = \pi_{k+1}/\pi_k$ | $1$ | $[1-\epsilon, 1+\epsilon]$ | $\pi_{k+1}$ 相对 $\pi_k$ 的偏移 | Decoupled PPO(AReaL 采用) |
对前文的逐样本硬约束版本而言,方法一 / 二确实直接控制 $D_{\mathrm{TV}}(\pi_{k+1}, \pi_k)$;而这里的 clipped surrogate 对应的是更温和的说法:它们分别对不同的偏移对象施加主要的优化压力。
标准 PPO 的根本问题(多策略混合)
沿用单源 PPO 的 trust-region 直觉,标准 PPO 的 clip 目标最自然的解读是:它试图抑制新策略相对每个采样来源策略 $\pi^{(i)}$ 的继续偏离。但 PPO-Clip 本身并不显式施加 TV / KL 约束,而是通过裁剪移除”继续远离行为策略”的收益;当各旧策略 $\pi^{(1)}, \pi^{(2)}, \ldots$ 之间差异显著时,这种优化压力容易被最陈旧的策略所牵制。
方法一与方法二的共同优势
两种方法共享同一个结构性优势:把主要优化压力从”同时贴近每个采样来源策略”改成”围绕当前策略 $\pi_k$ 控制更新增量”。由于 $\pi_k$ 是唯一确定的,这个目标对所有来源样本都一致,就绕开了统一硬 trust-region 约束的结构性困难。
方法一 vs 方法二
| 比较维度 | 方法一(自适应裁剪) | 方法二(增量裁剪) |
|---|---|---|
| 陈旧样本($\rho_k \gg 1$) | 自动收紧约束,更保守 | 可能产生大梯度方差 |
| LLM大词表低概率token | 允许较大绝对变化(加法型) | 绝对变化受限(乘法型) |
| 实现复杂度 | 需存储 $\pi^{(i)}(a\mid s)$ 和 $\pi_k(a\mid s)$ | 需 $\pi_k(a\mid s)$ 与 $\pi^{(i)}(a\mid s)$(或存储的 logprob)以计算 $\rho_k$;裁剪本身仅用 $\pi_{k+1}/\pi_k$ |
| 优势函数 | 使用 $A^{\beta^{(k)}}$ | 使用加权优势 $\rho_k \cdot A^{\beta^{(k)}}$ |
维度一:陈旧样本处理
样本来自很旧的策略时,$\rho_k = \pi_k/\pi^{(i)}$ 可能很大。
- 方法二的被积函数为 $\rho_k \cdot \lvert r - 1\rvert$,即便 $\lvert r-1\rvert \leq \epsilon$,被积函数仍可能达到 $\epsilon \cdot \rho_k$,产生尖峰。
- 方法一直接约束 $\lvert\rho_{k+1} - \rho_k\rvert \leq \epsilon$,被积函数上界恒为 $\epsilon$,不会被 $\rho_k$ 放大。
维度二:LLM 大词表问题
大语言模型词表规模巨大,大量 token 的概率极小。
- 方法二约束 $\pi_{k+1} \in [(1-\epsilon)\pi_k, (1+\epsilon)\pi_k]$,这是乘法型约束:若 $\pi_k(a\mid s) = 10^{-6}$,允许的绝对变化仅 $\epsilon \times 10^{-6}$。
- 方法一约束 $\lvert\pi_{k+1} - \pi_k\rvert \leq \epsilon \cdot \pi^{(i)}$,尺度由采样策略概率 $\pi^{(i)}$ 决定:若该 token 在旧策略下概率较高(例如 $\pi^{(i)}(a\mid s) = 0.1$),即便当前概率很低,也允许较快提升;当然,前提是该 token 在采样策略下有足够的概率质量、能被实际采到。
7.4 采样陈旧性控制与操作含义
前面讨论的都是优化侧的裁剪,但单调提升下界还含有采样陈旧性 $S_k$ 一项。本节处理采样侧的职责,并回到裁剪作为整体操作的准确含义。
采样陈旧性的控制
推论 5.3 表明 $S_k$ 同样影响单调提升下界,但它无法通过优化侧的裁剪来控制,需要由采样系统实现:
- 丢弃陈旧数据:设阈值 $\epsilon_{\mathrm{stale}}$,对每个样本计算 $\lvert\rho_k - 1\rvert = \lvert\pi_k(a\mid s)/\pi^{(i)}(a\mid s) - 1\rvert$,丢弃超过阈值的样本。
- 控制策略版本窗口:限制混合采样的旧策略版本数,例如只使用最近 $W$ 个版本的数据。AReaL 的最大陈旧性参数就是这个旋钮的一个已部署实例。
还有一种值得对照的分工方式。GePPO 不丢数据,而是按数据的期望年龄收缩裁剪半径:$\epsilon^{\mathrm{GePPO}} = \epsilon^{\mathrm{PPO}} / \mathbb{E}_{\nu}[i+1]$,分母随数据年龄增长——相当于让优化侧放慢脚步来吞下陈旧性预算。过滤与版本窗口则把预算花在采样侧、保持 $\epsilon$ 不动。哪种更合适,取决于瓶颈是算力(重新生成数据贵)还是更新进度(走得慢代价大)。
裁剪的操作含义
最后要澄清裁剪与理论下界的关系。
推论 5.3 里,$U_k$ 的系数 $C_{\pi_{k+1},\beta^{(k)}}$ 依赖于新策略 $\pi_{k+1}$,所以惩罚项不能简单地换成常数。正确的操作含义是:
在 $U_k \leq \epsilon/2$ 的约束下,最大化代理目标 $L_{\beta^{(k)}}(\pi_{k+1})$
裁剪目标函数可以看作这一约束优化的近似实现——通过裁剪近似限制更新幅度,让 $U_k$ 保持可控;在此基础上再通过梯度上升提升代理目标,尽量贴近前述单调改进分析。
本节小结
本节建立了裁剪机制的理论基础:
- 引理 7.1 把 TV 距离转化为样本层面的比值差,是连接理论与实现的桥梁;
- 两种约束方法:方法一(自适应裁剪中心)和方法二(固定增量裁剪)的硬约束版本都能保证 $U_k \leq \epsilon/2$;实践中的 clipped surrogate 是对这一思路的近似实现;
- 与标准 PPO 对比:沿用单源 trust-region 直觉,标准 PPO 的裁剪最自然地围绕”新策略相对行为策略的偏移”施加优化压力;方法一 / 二则把压力改为围绕当前策略 $\pi_k$ 控制更新增量,由此绕开多来源样本带来的结构性困难;
- 方法选择:陈旧性高或 LLM 大词表场景推荐方法一;若更希望”裁剪中心不再依赖旧策略族”,可选方法二(但仍需数据侧提供行为 logprob 来计算 $\rho_k$);
- $S_k$ 的控制由采样侧负责,通过数据过滤和版本窗口实现;
- 裁剪是约束优化:在 $U_k$ 约束下最大化代理目标。
8. 训推不一致的处理
8.1 背景与有效陈旧性
在大规模分布式训练中,推理端和训练端的策略可能不一致:
- 数值实现差异:softmax 归一化、量化、核融合等;
- 解码规则差异:温度缩放、top-p / top-k 采样等。
设训练侧建模的行为策略为 $\pi^{(i)}$,推理端实际采样的策略为 $\hat{\pi}^{(i)}$。
这里讨论的是”行为策略 vs. 当前训练策略”的失配,而不是 RLHF 里常见的”当前策略 vs. reference model”的 KL 正则——后者是另一条正则化轴线。真实系统里这种失配的测量与样本级修正(截断重要性采样、序列级掩码等),见三策略那篇的综述部分;本文只关心失配如何进入下界。
有效陈旧性
定义有效陈旧性:
$$ \hat{S}_k := \mathbb{E}_{(s,i) \sim d_{\hat{\beta}^{(k)}}} \big[ D_{\mathrm{TV}}(\pi_k, \hat{\pi}^{(i)}; s) \big] $$
这个定义同时涵盖了版本陈旧性与训推实现差异。
8.2 理论上的有效陈旧性控制
由引理 7.1,$\hat{S}_k$ 可写成样本级可计算的形式。给定阈值 $\epsilon_{\mathrm{stale}}$,若训练只使用满足 $\lvert\pi_k(a\mid s)/\hat{\pi}^{(i)}(a\mid s) - 1\rvert \leq \epsilon_{\mathrm{stale}}$ 的样本,则被保留样本的条件分布上的有效陈旧性(记为 $\hat{S}_k^{\mathrm{eff}}$)可被控制在 $\epsilon_{\mathrm{stale}}/2$ 以内。有两点限定让这句话保持诚实:其一,这里控制的是过滤后的训练分布,而不是原始采样分布上的 $\hat{S}_k$;其二,严格地说 $\hat{S}_k^{\mathrm{eff}}$ 是过滤后样本分布上 $\tfrac12\lvert\rho_k-1\rvert$ 的期望——它是 TV 的样本级代理,不再是两个固定策略之间的 TV 距离本身。
关键理论条件
- 行为分母对齐:损失中的行为概率要使用推理端记录的 $\hat{\pi}^{(i)}(a\mid s)$;
- 概率平滑:若推理端有截断(如 top-k),需通过平滑等方式保证比值合法,并满足引理 7.1 所需的支撑覆盖条件。
9. 总结:理论判据
核心理论框架
单调提升下界的结构为:
$$ J(\pi_{k+1}) - J(\pi_k) \geq \underbrace{L_{\beta^{(k)}}(\pi_{k+1})}_{\text{代理目标}} - \underbrace{C_1 \cdot U_k}_{\text{更新偏移惩罚}} - \underbrace{C_2 \cdot S_k}_{\text{采样陈旧性惩罚}} $$
这里的 $C_1, C_2$ 只是对前文理论常数的压缩记号,用来概括下界结构。具体来说,
$$ C_1 = \frac{2\gamma C_{\pi_{k+1},\beta^{(k)}}}{(1-\gamma)^2}, \qquad C_2 = C_1 + \frac{2\|A^{\pi_k}\|_\infty}{1-\gamma}, $$
正文为了突出结构,把记号压缩成了 $C_1, C_2$。它们不是实践里可以自由调节的超参数。若把第 5.4 节的优势替换误差显式纳入,则可把结构进一步写成
$$ J(\pi_{k+1}) - J(\pi_k) \gtrsim L_{\beta^{(k)}}(\pi_{k+1}) - C_1 U_k - C_2 S_k - C_3 \epsilon_A, $$
其中 $C_3$ 由重要性比率上界等条件决定。这不是新的算法项,而是提醒我们:单调提升条件还依赖实际优势估计是否足够接近理论优势。
整个式子应当读作证书而非无条件保证:只有右端为正时改进才被证明;而 5.3 节已经解释过,把 $S_k$ 压小是这张证书可能非空的前提。
理论职责分离
| 控制项 | 理论含义 | 约束方式 | 对应的分布对象 |
|---|---|---|---|
| $U_k$ | 当前更新漂移 | 对 $\pi_{k+1}$ 相对 $\pi_k$ 的偏移加约束 | 目标策略与近端策略 |
| $S_k$ | 采样陈旧漂移 | 限制行为策略与近端策略的距离 | 行为分布与近端分布 |
| $\epsilon_A$ | 优势替换误差 | 控制 $\hat A$ 与 $A^{\beta^{(k)}}$ 的偏差(单策略情形为 $A^{\pi_k}$) | 优势估计与理论优势 |
裁剪项的理论角色
| 裁剪对象 | 理论作用 | 代价 |
|---|---|---|
| 直接约束 $\pi_{k+1}/\pi^{(i)}$ | 同时限制更新漂移与部分陈旧性 | 对每个行为版本依赖更强 |
| 约束增量 $\pi_{k+1}/\pi_k$ | 只控制当前更新漂移 $U_k$ | 仍需额外控制 $S_k$ |
| 对比率做硬裁剪或过滤 | 得到更保守的 surrogate 上界 | 引入有偏目标,需重新解释单调条件 |
训推不一致的理论处理
- 若训练侧建模分布是 $\pi^{(i)}$,但真实采样分布是 $\hat{\pi}^{(i)}$,则下界中的行为分布应使用 $\hat{\pi}^{(i)}$。
- 过滤或裁剪只能控制条件分布上的 $\hat S_k^{\mathrm{eff}}$,不等于原始采样分布上的 $\hat S_k$ 自动变小。
- 若解码截断导致 common support 失败,则需要先修正支持集假设,再讨论 importance correction。
附录
A. 从状态分布差异到 average TV 的 proof sketch
证明引理 3.1 的常见起点是折扣状态访问分布的不动点方程:
$$ d_\pi = (1-\gamma)\rho_0 + \gamma P_\pi^\top d_\pi, \qquad d_{\pi_k} = (1-\gamma)\rho_0 + \gamma P_{\pi_k}^\top d_{\pi_k}. $$
两式相减并整理,就可以把 $d_\pi-d_{\pi_k}$ 写成”策略诱导转移核差异”作用在旧分布上的结果。随后对 $\ell_1$ 范数取上界,利用马尔可夫核在 $\ell_1$ 下的不扩张性,以及
$$ \|(P_\pi-P_{\pi_k})(\cdot\mid s)\|_1 \le 2D_{\mathrm{TV}}(\pi,\pi_k;s), $$
就能把状态分布差异控制到旧分布下的 average TV 上:
$$ \|d_\pi-d_{\pi_k}\|_1 \le \frac{2\gamma}{1-\gamma}\,\mathbb{E}_{s\sim d_{\pi_k}}\big[D_{\mathrm{TV}}(\pi,\pi_k;s)\big]. $$
这里省略了线性算子展开和常数整理;本文后续只用到最终的 average-TV 形式。
B. 关键符号速查表
| 符号 | 含义 |
|---|---|
| $\pi_k$, $\pi^{(i)}$ | 第 $k$ 轮最新策略,第 $i$ 个旧策略 |
| $d_\pi(s)$, $A^\pi(s,a)$ | 折扣状态访问分布,优势函数 |
| $D_{\mathrm{TV}}(\pi, \pi'; s)$ | 两策略在状态 $s$ 上的 TV 距离 |
| $\beta^{(k)}(a \mid s, i) := \pi^{(i)}(a \mid s)$ | 第 $k$ 轮混合行为策略 |
| $q(i' \mid i)$, $\alpha_i^{(k)}$ | 索引转移核,索引初始分布 |
| $U_k$, $S_k$ | 更新增量偏移,采样陈旧性 |
| $\epsilon$, $\epsilon_{\mathrm{stale}}$, $W$ | 裁剪半径,陈旧性阈值,版本窗口 |
| $C_{\pi,\pi_k}$ | 期望优势上界系数 |
相关文章
参考文献
- John Schulman, Sergey Levine, Philipp Moritz, Michael I. Jordan, Pieter Abbeel. “Trust Region Policy Optimization” (TRPO). arXiv:1502.05477. https://arxiv.org/abs/1502.05477
- Joshua Achiam, David Held, Aviv Tamar, Pieter Abbeel. “Constrained Policy Optimization” (CPO). arXiv:1705.10528. https://arxiv.org/abs/1705.10528
- John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, Oleg Klimov. “Proximal Policy Optimization Algorithms” (PPO). arXiv:1707.06347. https://arxiv.org/abs/1707.06347
- James Queeney, Ioannis Ch. Paschalidis, Christos G. Cassandras. “Generalized Proximal Policy Optimization with Sample Reuse” (GePPO). arXiv:2111.00072. https://arxiv.org/abs/2111.00072
- Yuzhen Zhou, Jiajun Li, Yusheng Su, et al. “APRIL: Active Partial Rollouts in Reinforcement Learning to Tame Long-tail Generation” (APRIL; partial rollout). arXiv:2509.18521. https://arxiv.org/abs/2509.18521
- Jacob Hilton, Karl Cobbe, John Schulman. “Batch size-invariance for policy optimization” (Decoupled PPO). arXiv:2110.00641. https://arxiv.org/abs/2110.00641
- Sham Kakade, John Langford. “Approximately Optimal Approximate Reinforcement Learning”. ICML 2002. https://dl.acm.org/doi/10.5555/645531.657706
- Lasse Espeholt, Hubert Soyer, Rémi Munos, et al. “IMPALA: Scalable Distributed Deep-RL with Importance Weighted Actor-Learner Architectures” (V-trace). arXiv:1802.01561. https://arxiv.org/abs/1802.01561
- Wei Fu, Jiaxuan Gao, Xujie Shen, et al. “AReaL: A Large-Scale Asynchronous Reinforcement Learning System for Language Reasoning”. arXiv:2505.24298. https://arxiv.org/abs/2505.24298
- Michael Noukhovitch, Shengyi Huang, Sophie Xhonneux, et al. “Asynchronous RLHF: Faster and More Efficient Off-Policy RL for Language Models”. arXiv:2410.18252. https://arxiv.org/abs/2410.18252