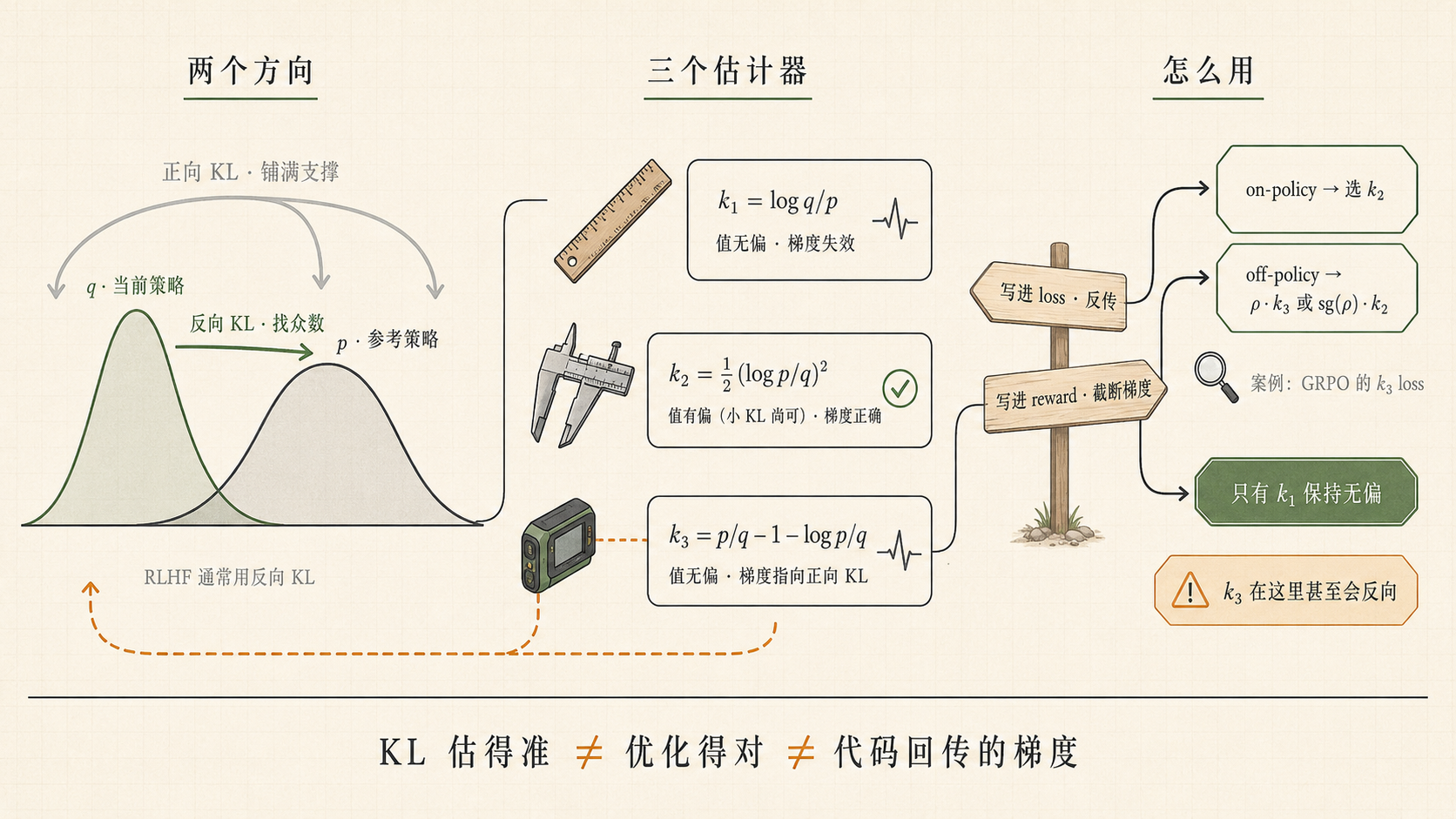
在强化学习中,KL 估计器不能只看数值估得准不准,还要看它在 loss 或 reward 写法下究竟优化了谁。本文比较三种经典估计器 $k_1, k_2, k_3$ 在 on-policy 和 off-policy 场景下的性质差异,并说明当 KL 作为可微损失项或 detached 的奖励塑形项时,选型结论会怎样变化。
1. 引言:KL 散度(Kullback-Leibler 散度)在强化学习中的角色
这篇文章只想回答一个实现层面的问题:同样都写着”加 KL 惩罚”,为什么换一个估计器、换一个采样分布,或只是多加一个 .detach(),优化目标就可能已经变了?在策略优化算法(如 PPO、GRPO)或对齐训练框架(如 RLHF、RLAIF)中,KL 惩罚项看似只是个稳定训练的正则项;但一旦落到代码层面,实现方式就分出好几个维度:估计器的选择($k_1$、$k_2$、$k_3$)、采样分布的选择(on-policy 或 off-policy),以及 KL 项的用法(作为损失项直接反传,还是作为奖励塑形项)。
要把这个问题讲清楚,得分开两件事:一是”估计某个 KL 的数值”,二是”反向传播时实际在优化哪个目标”。很多实现恰恰就是在这两件事上把概念混在了一起。
1.1 正向 KL 与反向 KL 的区别
设 $q_\theta$ 为当前 actor 策略,$p$ 为参考策略,两种方向的 KL 散度分别为:
反向 KL(Reverse KL):
$$ D_{\mathrm{KL}}(q_\theta \| p) = \mathbb{E}_{x \sim q_\theta}\left[\log \frac{q_\theta(x)}{p(x)}\right] $$
正向 KL(Forward KL):
$$ D_{\mathrm{KL}}(p \| q_\theta) = \mathbb{E}_{x \sim p}\left[\log \frac{p(x)}{q_\theta(x)}\right] $$
直观解释:
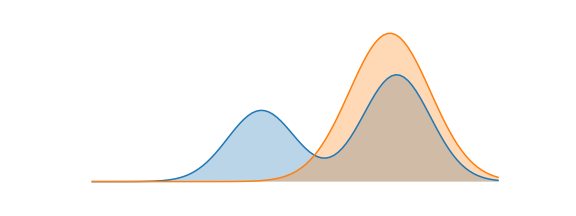
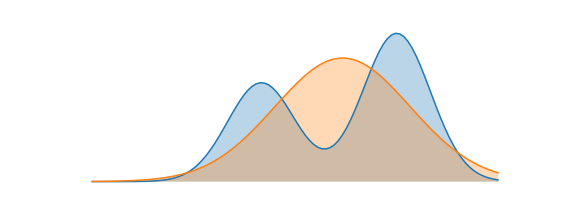
- 反向 KL 是 mode-seeking 的:优化后的策略会集中到参考分布的高概率区域,多样性可能降低。
- 正向 KL 是 mass-covering 的:策略会尽量铺满参考分布的整个支撑集。
RLHF 的主流实现里更常用 反向 KL,因为通常只希望 actor 策略不要过度偏离参考策略,而不是要求它完全覆盖参考分布的所有模式。
1.2 先用三问把问题定下来
实现 KL 惩罚时的分歧可以归为三个问题:样本从谁来、想约束哪个方向的 KL、KL 项是直接反传还是只做 reward 的系数。任意换掉其中一个答案,推荐的估计器就可能跟着变:
| 问题 | 如果答案是…… | 需要警惕什么 |
|---|---|---|
| KL 是否直接反传? | 直接反传:KL 是 loss;不直接反传:KL 是 reward shaping 或监控量 | 同一个 $k_i$ 放进 loss 和 reward,梯度语义不同 |
| 样本来自哪里? | 来自 $q_\theta$ 是 on-policy;来自 $\mu$ 是 off-policy | off-policy 下必须区分目标分布与采样分布 |
| 想约束哪个方向? | 反向 KL、正向 KL,或某个局部 surrogate | 数值估计的 KL 方向不一定等于 loss 的梯度方向 |
本文范围:主要讨论 token/sample 级 KL 项及其在 policy-gradient 主项中的行为。Critic、GAE、baseline 归一化,以及一般多步 MDP 的严格 off-policy 修正,只在相关处简要说明,不做系统展开。
与主要讨论 KL 数值近似的经典笔记不同,本文更关心近期 LLM-RL 文献反复提到的那个问题:同一个估计器一旦从 reward 系数改成可微损失项,梯度到底还在不在优化你以为的目标。这三问决定了后文所有选型结论,尤其要记住:
$$ \text{KL 数值估计器} \neq \text{KL 优化目标} \neq \text{代码实际回传的梯度}. $$
本文后面的表格和推导,都是在反复检查这三个对象是否一致——多数”错误写法”的问题不是数值偏差稍大,而是梯度目标已经悄悄变了。操作层面的答案已浓缩在下一章的三张速查表里。
2. 选型速查表(可跳读)
下面三张表是全文最核心的操作结论。先给出一页符号预备,读者可以据此在对应场景里直接选出推荐写法,再按需回到后面相应章节看推导。
符号速览(完整定义见下一章):
- $q_\theta$:当前策略;$p$:参考策略;$\mu$:采样策略(on-policy 时 $\mu=q_\theta$)。
- $k_1 = \log\frac{q_\theta}{p}$,$k_2 = \frac{1}{2}\left(\log\frac{p}{q_\theta}\right)^2$,$k_3 = \frac{p}{q_\theta}-1-\log\frac{p}{q_\theta}$。
- $\rho = \frac{q_\theta}{\text{sg}(\mu)}$:统一重要性权重;$\text{sg}(\cdot)$ 表示 stop-gradient。
2.1 On-policy 下把反向 KL 写成损失项
| 损失项写法 | 优点 | 问题 | 推荐 |
|---|---|---|---|
| $k_1$ | — | 梯度期望为零,完全无效,不能用于优化 | ✗✗ |
| $k_2$ | 梯度正确(反向 KL),低方差,实现最简单 | 数值有偏(小 KL 邻域通常偏差较小) | ✓✓ |
| $k_3$ | — | 若目标是反向 KL,则它对应的是正向 KL 梯度 | ✗✗ |
| $\frac{q_\theta}{\text{sg}(q_\theta)} k_3$ | 梯度正确(反向 KL),低方差,数值无偏 | 需显式构造 $\rho$,实现稍复杂 | ✓ |
注:$k_2$ 与 $\frac{q_\theta}{\text{sg}(q_\theta)} k_3$ 的梯度完全相同(样本级等价)。On-policy 时推荐直接用 $k_2$,实现最简单。
2.2 Off-policy 下把反向 KL 写成损失项
| 损失项写法 | 优点 | 问题 | 推荐 |
|---|---|---|---|
| $\frac{q_\theta}{\mu} k_1$ | 梯度正确(反向 KL),数值无偏 | 方差较高 | △ |
| $\frac{q_\theta}{\mu} k_2$ | — | 梯度对应局部二阶 surrogate(非反向 KL),与本文目标不匹配 | ✗✗ |
| $\text{sg}\left(\frac{q_\theta}{\mu}\right) k_2$ | 梯度正确(反向 KL),低方差 | 数值有偏(小 KL 邻域通常偏差较小) | ✓✓ |
| $\frac{q_\theta}{\mu} k_3$ | 梯度正确(反向 KL),低方差,数值无偏 | — | ✓✓ |
注:$\text{sg}\left(\frac{q_\theta}{\mu}\right) k_2$ 与 $\frac{q_\theta}{\mu} k_3$ 的梯度完全相同(样本级等价)。两者均为推荐选择。
2.3 把 KL 写成奖励塑形项(stop-grad shaped reward)
| 估计器 | 优点 | 问题 | 推荐 |
|---|---|---|---|
| $k_1$ | 数值无偏,诱导的梯度主项无偏 | 方差较高 | ✓✓ |
| $k_2$ | 数值有偏 | 诱导的策略梯度一般有偏(通常不等于目标项) | ✗✗ |
| $k_3$ | 数值无偏,低方差 | 诱导的策略梯度有偏,偏差项为 $-\nabla D_{\mathrm{KL}}(p\|q)$,会额外引入并非目标反向 KL 的梯度项 | ✗✗ |
注:在本文讨论的 stop-grad reward shaping 场景下,只有 $k_1$ 能保持与反向 KL 正则一致的无偏策略梯度主项。$k_2$ 和 $k_3$ 都会引入偏差;其中 $k_3$ 虽然数值无偏且方差低,但理论上已经偏离目标梯度。
图例:✓✓ 强烈推荐;✓ 推荐(实现稍复杂或有小缺点);△ 可用需谨慎;✗✗ 与目标不匹配。
想看推导、方差分析、常见陷阱,直接往下读。
3. 准备工作:符号与基本概念
在进入正文前,先统一符号,并把后文反复要用的两个基础结论写清楚。
3.1 符号、采样分布与目标函数的真梯度
符号约定
- $q_\theta$:当前 actor 策略(参数为 $\theta$)
- $q$:若无歧义,后文简写 $q := q_\theta$
- $p$:参考策略(reference policy),不依赖于 $\theta$
- $\mu$:行为策略(behavior policy),用于 off-policy 采样,不依赖于 $\theta$
- $s_\theta(x) = \nabla_\theta \log q_\theta(x)$:score function(得分函数)
- $\text{sg}(\cdot)$:stop-gradient 操作(在代码中对应
.detach())
统一的采样策略视角:引入 $\rho$ 记号
分析 KL 估计器的梯度性质时,on-policy 和 off-policy 看起来像要分开处理,但其实可以放进同一个框架。
为此引入采样策略 $\mu$,即数据来自分布 $x \sim \mu$,并定义统一的重要性权重比率:
$$ \rho(x) := \frac{q_\theta(x)}{\text{sg}(\mu(x))} $$
这个定义的关键是:无论 on-policy 还是 off-policy,都把采样策略 $\mu$ 视为梯度常数(即对 $\mu$ 应用 stop-gradient)。
- Off-policy($\mu \neq q_\theta$):由于 $\mu$ 本身不依赖于 $\theta$,$\text{sg}(\mu) = \mu$,此时 $\rho = \frac{q_\theta}{\mu}$。
- On-policy($\mu = q_\theta$):令 $\mu = q_\theta$ 但对其应用 stop-gradient,则 $\rho = \frac{q_\theta}{\text{sg}(q_\theta)} \equiv 1$(数值恒为 1),但 $\nabla_\theta \rho = s_\theta \neq 0$。
在 on-policy 情形下,虽然数值上 $\rho\equiv 1$,仍要在计算图中显式构造 $\rho=\frac{q_\theta}{\text{sg}(q_\theta)}$(或等价写成 $\rho=\exp(\log q_\theta-\text{sg}(\log q_\theta))$):它补上的正是”采样分布依赖参数 $\theta$”这条梯度路径——on-policy 时”先取期望后求梯度”与”先求梯度后取期望”结果不同,缺的就是这条路径。若把 $\rho$ 写成字面常数 1,这条路径就丢了,推导退化成后文的”朴素 on-policy 实现”。
有了这个记号,后面的推导就不必再分 on-policy 和 off-policy 两套写法。
得分函数与 KL 散度的目标函数的真梯度
得分函数有一个重要性质:$\mathbb{E}_{q_\theta}[s_\theta] = 0$(由 $\int \nabla_\theta q_\theta dx = \nabla_\theta \int q_\theta dx = \nabla_\theta 1 = 0$ 可得)。
基于这一性质,可以推导出正向与反向 KL 散度关于参数 $\theta$ 的目标函数的真梯度。
反向 KL 的梯度:
$$ D_{\mathrm{KL}}(q_\theta \| p) = \int q_\theta(x) \log \frac{q_\theta(x)}{p(x)} dx $$
对 $\theta$ 求梯度(应用乘积法则):
$$ \nabla_\theta D_{\mathrm{KL}}(q_\theta \| p) = \int \nabla_\theta q_\theta \cdot \log \frac{q_\theta}{p} dx + \int q_\theta \cdot \nabla_\theta \log \frac{q_\theta}{p} dx $$
利用 $\nabla_\theta q_\theta = q_\theta \cdot s_\theta$,以及 $\nabla_\theta \log q_\theta = s_\theta$、$\nabla_\theta \log p = 0$,可得:
$$ = \mathbb{E}_{q_\theta}\left[s_\theta \cdot \log \frac{q_\theta}{p}\right] + \int q_\theta(x) \cdot s_\theta(x)\, dx \\ = \mathbb{E}_{q_\theta}\left[s_\theta \cdot \log \frac{q_\theta}{p}\right] + \mathbb{E}_{q_\theta}[s_\theta] \\ = \mathbb{E}_{q_\theta}\left[s_\theta \cdot \log \frac{q_\theta}{p}\right] $$
即:
$$ \boxed{\nabla_\theta D_{\mathrm{KL}}(q_\theta \| p) = \mathbb{E}_{q_\theta}\left[s_\theta \cdot \log \frac{q_\theta}{p}\right] = -\mathbb{E}_{q_\theta}\left[s_\theta \cdot \log \frac{p}{q_\theta}\right]} $$
注:后文将定义 $k_1 := -\log\frac{p}{q_\theta}$,因此上式可简写为 $\nabla_\theta D_{\mathrm{KL}}(q_\theta \| p) = \mathbb{E}_{q_\theta}[s_\theta \cdot k_1]$,这一形式在后续梯度分析中会反复出现。
正向 KL 散度的梯度:
$$ D_{\mathrm{KL}}(p \| q_\theta) = \int p(x) \log \frac{p(x)}{q_\theta(x)} dx $$
由于 $p(x)$ 不依赖于参数 $\theta$:
$$ \nabla_\theta D_{\mathrm{KL}}(p \| q_\theta) = \int p(x) \cdot \nabla_\theta \left(-\log q_\theta(x)\right) dx = -\mathbb{E}_p[s_\theta] $$
为了用来自 $q$ 的样本估计该梯度,引入重要性采样:
$$ -\mathbb{E}_p[s_\theta] = -\mathbb{E}_{q_\theta}\left[\frac{p}{q_\theta} \cdot s_\theta\right] = \mathbb{E}_{q_\theta}\left[\left(1-\frac{p}{q_\theta}\right) \cdot s_\theta\right] $$
其中最后一步用到了 $\mathbb{E}_{q_\theta}[s_\theta]=0$。因此
$$ \boxed{\nabla_\theta D_{\mathrm{KL}}(p \| q_\theta) = \mathbb{E}_{q_\theta}\left[\left(1-\frac{p}{q_\theta}\right) \cdot s_\theta\right]} $$
注:后文将推导 $\nabla_\theta k_3 = (1-\frac{p}{q_\theta}) s_\theta$,因此 $\mathbb{E}_{q_\theta}[\nabla_\theta k_3] = \nabla_\theta D_{\mathrm{KL}}(p \| q_\theta)$(正向 KL)——这解释了为何直接对 $k_3$ 反向传播会给出”错误”的梯度方向。
有了这两个结果,后续就能判断各个估计器的梯度期望各自对应哪种 KL 散度的目标函数的真梯度。
4. 三种估计器的定义与设计原理
围绕概率比值 $\frac{p(x)}{q_\theta(x)}$,John Schulman 在一篇经典笔记里系统比较了三种单样本 KL 估计器。本节先把它们的定义和设计动机放在一起看。
4.1 三种估计器:定义与直观解释
$k_1$:最朴素的 log-ratio 估计器
$$ k_1(x) = -\log \frac{p(x)}{q_\theta(x)} = \log q_\theta(x) - \log p(x) $$
最直观的定义——直接取对数比值的负值。它对反向 KL 无偏,主要问题不是目标错了,而是单样本值可正可负;当真实 KL 很小时,样本仍可能大幅正负摆动,所以相对方差往往很高。
$k_2$:基于平方 log-ratio 的估计器
$$ k_2(x) = \frac{1}{2}\left(\log \frac{p(x)}{q_\theta(x)}\right)^2 $$
设计动机:$k_1$ 的估计值可正可负,$k_2$ 通过取平方让每个样本的估计值都非负,这样每个样本都能直观地衡量 $p$ 和 $q$ 之间的差异。
为什么偏差通常不大? 更准确地说,$\mathbb{E}_{q_\theta}[k_2]$ 不是标准 KL,但在 $q_\theta \approx p$ 的邻域里它和反向 KL 共享相同的二阶局部展开,因此可以看作一个局部有效的 surrogate;一旦离开小 KL 邻域,这个近似就未必还可靠。
技术注记:$k_2$ 为什么与反向 KL 具有相同的二阶局部行为?
若取 $\theta_0$ 使得 $q_{\theta_0}=p$,并在标准正则性条件下(以保证积分与微分可交换)对参数做小扰动 $\Delta\theta$,则有
$$ \mathbb{E}_{q_{\theta_0+\Delta\theta}}[k_2] = \frac{1}{2}\, \Delta\theta^T F(\theta_0)\, \Delta\theta + O(\|\Delta\theta\|^3), $$
同时
$$ D_{\mathrm{KL}}\big(q_{\theta_0+\Delta\theta} \| p\big) = \frac{1}{2}\, \Delta\theta^T F(\theta_0)\, \Delta\theta + O(\|\Delta\theta\|^3), $$
其中 $F(\theta_0)$ 是 $\theta_0$ 处的 Fisher 信息矩阵。
$k_3$:控制变量法构造的 Bregman 散度估计器
$$ k_3(x) = \frac{p(x)}{q_\theta(x)} - 1 - \log \frac{p(x)}{q_\theta(x)} $$
设计动机:希望得到一个既无偏又低方差的估计器。标准做法是给 $k_1$ 加一个控制变量(control variate)——即期望为零、但与 $k_1$ 负相关的量。
注意到 $\mathbb{E}_{q_\theta}\left[\frac{p}{q_\theta} - 1\right] = \mathbb{E}_{q_\theta}\left[\frac{p}{q_\theta}\right] - 1 = 1 - 1 = 0$,因此对任意 $\lambda$,
$$ k_1 + \lambda\left(\frac{p}{q_\theta} - 1\right) = -\log \frac{p}{q_\theta} + \lambda\left(\frac{p}{q_\theta} - 1\right) $$
仍是无偏估计。
为什么选 $\lambda = 1$? 由于 $\log$ 是凹函数,$\log x \leq x - 1$,所以
$$ k_3 = \left(\frac{p}{q_\theta} - 1\right) - \log \frac{p}{q_\theta} \geq 0 $$
恒非负!每个样本都”正向”贡献信息,避免了 $k_1$ 中正负估计值相互抵消的问题。
几何视角:$k_3$ 其实就是一个 Bregman 散度。考虑凸函数 $\phi(x) = -\log x$,它在 $x=1$ 处的切线为 $y = 1 - x$。Bregman 散度定义为函数值与切线值之差:
$$ \begin{aligned} D_\phi\left(\frac{p}{q_\theta}, 1\right) &= \phi\left(\frac{p}{q_\theta}\right) - \phi(1) - \phi'(1)\left(\frac{p}{q_\theta} - 1\right) \\ &= -\log \frac{p}{q_\theta} - 0 - (-1)\left(\frac{p}{q_\theta} - 1\right) \\ &= \frac{p}{q_\theta} - 1 - \log \frac{p}{q_\theta} \\ &= k_3. \end{aligned} $$
凸函数始终位于其切线上方,所以这个差值自然非负。更关键的是,当 $\frac{p}{q_\theta} \to 1$ 时,函数与切线越来越贴近,差值以 $\left(\frac{p}{q_\theta} - 1\right)^2$ 的二阶速度趋近于零——这正是 $k_3$ 在两策略接近时方差较小的根本原因。
第三种解读(unnormalized KL):RPG(Zhang et al., 2025)指出,$k_3$ 恰好是”非归一化 KL”(generalized KL)$D(\tilde q \| \tilde p) = \int \tilde q \log \frac{\tilde q}{\tilde p} - \int \tilde q + \int \tilde p$ 的被积函数:对归一化的 $q, p$ 逐点展开,$q \cdot \left[\log\frac{q}{p} + \frac{p}{q} - 1\right] = q \cdot k_3$。标准 KL 的被积函数 $q\log\frac{q}{p}$ 逐点可负,而它逐点非负——控制变量、Bregman 散度、unnormalized KL 三种解读,说的其实是同一个构造。
三者的设计逻辑对比如下:
| 估计器 | 定义 | 设计原理 |
|---|---|---|
| $k_1$ | $-\log \frac{p}{q_\theta}$ | 最朴素定义 |
| $k_2$ | $\frac{1}{2}\left(\log \frac{p}{q_\theta}\right)^2$ | 局部二阶行为与 KL 一致的 surrogate |
| $k_3$ | $\frac{p}{q_\theta} - 1 - \log \frac{p}{q_\theta}$ | 控制变量 + Bregman 散度 |
在进入偏差、方差和梯度推导前,先把使用语义分开:同一个 $k_i$ 可以当数值监控量(只关心期望与方差)、当可微 loss(关心反传梯度对应哪个目标),也可以当 reward shaping 的系数(关心它诱导的策略梯度)。后文说某个写法”对”或”不对”,指的不是这个样本值能否估计 KL,而是它在给定用法下是否产生目标函数需要的梯度。
5. 数值估计:偏差与方差
假设从 $q_\theta$ 采样来估计反向 KL $D_{\mathrm{KL}}(q_\theta \| p)$:
5.1 无偏性分析
$$ \begin{aligned} \mathbb{E}_{q_\theta}[k_1] &= \mathbb{E}_{q_\theta}\left[\log \frac{q_\theta}{p}\right] = D_{\mathrm{KL}}(q_\theta \| p) && \textbf{(无偏)} \\[8pt] \mathbb{E}_{q_\theta}[k_3] &= \mathbb{E}_{q_\theta}\left[\frac{p}{q_\theta} - 1 - \log \frac{p}{q_\theta}\right] && \\ &= 1 - 1 + D_{\mathrm{KL}}(q_\theta \| p) && \\ &= D_{\mathrm{KL}}(q_\theta \| p) && \textbf{(无偏)} \\[8pt] \mathbb{E}_{q_\theta}[k_2] &= \frac{1}{2}\mathbb{E}_{q_\theta}\left[\left(\log \frac{p}{q_\theta}\right)^2\right] \neq D_{\mathrm{KL}}(q_\theta \| p) && \textbf{(有偏)} \end{aligned} $$
估计反向 KL 的数值时,$k_1$ 和 $k_3$ 无偏,$k_2$ 有偏。
5.2 方差特性分析
John Schulman 笔记中的数值例子($q = \mathcal{N}(0,1)$,$p = \mathcal{N}(0.1,1)$,真实 KL = 0.005)显示:
| 估计器 | 偏差/真值 | 标准差/真值 |
|---|---|---|
| $k_1$ | 0 | 20 |
| $k_2$ | 0.002 | 1.42 |
| $k_3$ | 0 | 1.42 |
当 KL 较大时($p = \mathcal{N}(1,1)$,真实 KL = 0.5):
| 估计器 | 偏差/真值 | 标准差/真值 |
|---|---|---|
| $k_1$ | 0 | 2 |
| $k_2$ | 0.25 | 1.73 |
| $k_3$ | 0 | 1.7 |
直觉上:
- $k_1 = -\log \frac{p}{q_\theta}$ 以一阶项起步,当 $\frac{p}{q_\theta}$ 接近 1 时波动较大,且可能取负值;
- $k_3 = \frac{p}{q_\theta} - 1 - \log \frac{p}{q_\theta}$ 在 $\frac{p}{q_\theta}=1$ 处是二阶小量,始终非负,所以两策略接近时方差较小;
- 但离开小 KL、覆盖良好的局部区域后($\frac{p}{q_\theta}$ 可能极大),$k_3$ 的方差也会因权重爆炸而迅速上升:局部有 $k_3 \approx \frac{1}{2}\left(\frac{p}{q_\theta} - 1\right)^2$,其期望是 $\chi^2$ 散度 $\chi^2(p \| q)$ 的一半——恰好是覆盖变差时发散的那个量。此时 $k_1$ 和 $k_3$ 的优劣就不能简单一刀切了。
从纯数值估计的角度看:$k_1$ 无偏但高方差,$k_2$ 低方差但有偏,$k_3$ 无偏、恒正、低方差。因此在小 KL、覆盖良好的常见局部场景下,只看数值时 $k_3$ 往往是更稳妥的选择。
注:若要估计正向 KL 的数值 $D_{\mathrm{KL}}(p \| q_\theta) = \mathbb{E}_p\left[\log \frac{p}{q_\theta}\right]$,而只能从 $q_\theta$ 采样,重要性采样给出 $\mathbb{E}_{q_\theta}[r \log r]$(记 $r = \frac{p}{q_\theta}$)。Schulman 的笔记还多走了一步:减去零均值的控制变量 $r - 1$,得到 $\mathbb{E}_{q_\theta}[r \log r - (r - 1)]$——仍然无偏,但恒非负且方差更低(与 $k_3$ 同款的 Bregman 构造,只是换成 $f(x) = x \log x$)。
6. KL 惩罚的两种使用方式
接下来真正分出岔路的是 KL 惩罚在实现里到底怎么用。这一步决定了只关心估计器的数值性质,还是要把梯度性质一并算进去。
回顾 KL 正则化强化学习的目标函数($\tau\sim q_\theta$ 表示由策略 $q_\theta$ 诱导的轨迹分布,$\beta>0$ 为惩罚系数):
$$ J(\theta) = \mathbb{E}_{\tau \sim q_\theta} \left[ \sum_{t=0}^T \gamma^t r(s_t, a_t) \right] - \beta \cdot D_{\mathrm{KL}}(q_\theta \| p) $$
先补一句与后文 token 级分析的衔接:当两个策略共享同一环境转移(在 LLM RL 中即同样的上下文拼接过程)时,轨迹级 KL 可以精确分解($\gamma = 1$ 时)为逐 token 条件 KL 的期望和——实现中惩罚的 token 级 KL 正是这一分解的代码形态。
这个数学形式看似统一,但在基于策略梯度(Policy Gradient)的算法(如 PPO)中实现时,会分化出两种截然不同的范式——代码上可能只差几行,优化语义却完全不同。
符号说明:本节用 $\text{KL}_t$ 或 $\text{KL}(s)$ 泛指某个 token/state 级的 KL 估计器(如 $k_1, k_2, k_3$),具体定义见前文”三种估计器的定义与设计原理”。
6.1 作为损失项:KL 直接反传
actor_loss = -advantage * log_prob + beta * kl # kl 参与梯度计算
Critic 只学习环境价值,KL 作为 actor 的正则项直接参与 loss 的反向传播。
6.2 作为奖励塑形项:KL 只改 reward,不直接反传
kl = compute_kl(log_prob_q, log_prob_p).detach()
shaped_reward = reward - beta * kl
KL 被视为环境奖励的一部分,用塑形后的奖励进行标准的 actor-critic 更新。KL 项本身不参与 loss 的反向传播。
很多实现里这两种写法只差一个 .detach();但从优化语义看,它们并不是同一种算法。差别先说清楚:
- KL 作为损失项:需要 KL 估计器给出正确的显式梯度,关心梯度对应哪个优化目标;
- KL 作为奖励塑形项:需要 KL 的数值估计准确,同时还要看它诱导的策略梯度是否正确。
7. 作为损失项时的梯度分析
当 KL 散度作为损失函数参与反向传播时,不同估计器对应的优化目标并不相同。这里也是实现语义上最容易混淆的地方。
下面沿用 3.1 节的统一权重 $\rho = \frac{q_\theta}{\text{sg}(\mu)}$,把 on-policy 与 off-policy 放进同一套推导。两种情形下都有 $\nabla_\theta \rho = \rho \cdot s_\theta$:off-policy 时 $\rho = \frac{q_\theta}{\mu}$;on-policy 时数值上 $\rho \equiv 1$,但梯度 $\nabla_\theta \rho = s_\theta$ 并不为零。
7.1 三种估计器的基本梯度
先计算三种估计器本身的梯度(不含 $\rho$),这些结果会在后续分析中反复使用。
推导 $\nabla_\theta k_1$:由 $k_1 = \log q_\theta(x) - \log p(x)$ 且 $\nabla_\theta \log p = 0$:
$$ \nabla_\theta k_1 = \nabla_\theta \log q_\theta(x) = s_\theta $$
推导 $\nabla_\theta k_2$:
$$ k_2 = \frac{1}{2}\left(\log \frac{p}{q_\theta}\right)^2 $$
由链式法则:
$$ \begin{aligned} \nabla_\theta k_2 &= \left(\log \frac{p}{q_\theta}\right) \cdot \nabla_\theta\left(\log \frac{p}{q_\theta}\right) \\ &= \left(\log \frac{p}{q_\theta}\right) \cdot \nabla_\theta(\log p(x) - \log q_\theta(x)) \\ &= \left(\log \frac{p}{q_\theta}\right)(-s_\theta) \\ &= - \left(\log \frac{p}{q_\theta}\right) s_\theta. \end{aligned} $$
推导 $\nabla_\theta k_3$:
$$ k_3 = \frac{p}{q_\theta} - 1 - \log \frac{p}{q_\theta} $$
首先计算 $\nabla_\theta \frac{p}{q_\theta}$。由于 $\frac{p}{q_\theta} = p(x) \cdot q_\theta(x)^{-1}$:
$$ \nabla_\theta \frac{p}{q_\theta} = p(x) \cdot (-1) \cdot q_\theta(x)^{-2} \cdot \nabla_\theta q_\theta(x) = -\frac{p(x)}{q_\theta(x)} \cdot \frac{\nabla_\theta q_\theta(x)}{q_\theta(x)} = -\frac{p}{q_\theta} \cdot s_\theta $$
再计算 $\nabla_\theta \log \frac{p}{q_\theta}$:
$$ \nabla_\theta \log \frac{p}{q_\theta} = \frac{q_\theta}{p} \nabla_\theta \frac{p}{q_\theta} = \frac{q_\theta}{p} \cdot \left(-\frac{p}{q_\theta} \cdot s_\theta\right) = -s_\theta $$
因此:
$$ \nabla_\theta k_3 = \nabla_\theta \frac{p}{q_\theta} - 0 - \nabla_\theta \log \frac{p}{q_\theta} = -\frac{p}{q_\theta} \cdot s_\theta - (-s_\theta) = \left(1 - \frac{p}{q_\theta}\right) \cdot s_\theta $$
三种估计器的梯度分别为:
- $\nabla_\theta k_1 = s_\theta$
- $\nabla_\theta k_2 = -\left(\log \frac{p}{q_\theta}\right) s_\theta = k_1 \cdot s_\theta$
- $\nabla_\theta k_3 = \left(1 - \frac{p}{q_\theta}\right) s_\theta$
这些基本梯度会在后续的统一框架分析中反复出现。
“数学目标的梯度” vs “代码实际回传的梯度”:一个重要警示
分析 KL 估计器的梯度时,有一个容易混淆的陷阱:“先期望后梯度”和”先梯度后期望”可能给出不同结果。
如果从解析角度把 $\mathbb{E}_{q_\theta}[k_i]$ 看成 $\theta$ 的函数再求梯度(即”先期望后梯度”),由”数值估计”一节的结论 $\mathbb{E}_{q_\theta}[k_1] = \mathbb{E}_{q_\theta}[k_3] = D_{\mathrm{KL}}(q_\theta \| p)$,可得:
$$ \nabla_\theta \mathbb{E}_{q_\theta}[k_1] = \nabla_\theta D_{\mathrm{KL}}(q_\theta \| p) $$
$$ \nabla_\theta \mathbb{E}_{q_\theta}[k_3] = \nabla_\theta D_{\mathrm{KL}}(q_\theta \| p) $$
两者都给出反向 KL 的梯度。但在代码中直接对 $k_i$ 的样本均值反向传播时,自动微分执行的是”先梯度后期望”,得到的是 $\mathbb{E}_{q_\theta}[\nabla_\theta k_i]$——这与”先期望后梯度”的结果可能不同。
差异的根源在于:当采样分布 $q_\theta$ 本身依赖于 $\theta$ 时,期望与梯度不能随意交换。这正是 on-policy 场景最麻烦的地方,也是为什么需要把 $\rho$ 这条路径显式写出来。
7.2 统一框架下的梯度分析
下面用 $\rho$ 框架统一处理 on-policy 和 off-policy。考虑损失函数形式 $L = \rho \cdot k$,其中 $\rho = \frac{q_\theta}{\text{sg}(\mu)}$。(全文默认 $\mu$ 覆盖 $q_\theta$,即 $\mathrm{supp}(q_\theta) \subseteq \mathrm{supp}(\mu)$,保证 $\rho$ 良定义。)
以下期望一律对固定采样分布 $\mu$ 取。由于 $\mu$ 不依赖 $\theta$,微分与期望可以放心交换(上一节的警示只针对 $\mathbb{E}_{q_\theta}[\cdot]$):
$$ \nabla_\theta \mathbb{E}_{\mu}[f_\theta(x)] = \mathbb{E}_{\mu}[\nabla_\theta f_\theta(x)] $$
统一框架下三种估计器的梯度推导
利用 $\nabla_\theta \rho = \rho \cdot s_\theta$(因为 $\rho = q_\theta / \text{sg}(\mu)$),结合前文推导的 $\nabla_\theta k_i$,应用乘积法则:
$\nabla_\theta(\rho k_1)$:
$$ \nabla_\theta(\rho k_1) = (\nabla_\theta \rho) k_1 + \rho (\nabla_\theta k_1) = \rho s_\theta k_1 + \rho s_\theta = \rho s_\theta (k_1 + 1) $$
$\nabla_\theta(\rho k_2)$:
$$ \nabla_\theta(\rho k_2) = \rho s_\theta k_2 + \rho \left(-\log \frac{p}{q_\theta}\right) s_\theta = \rho s_\theta \left(k_2 - \log \frac{p}{q_\theta}\right) = \rho s_\theta (k_2 + k_1) $$
$\nabla_\theta(\text{sg}(\rho) k_2)$(对 $\rho$ 施加 stop-gradient):
$$ \nabla_\theta(\text{sg}(\rho) k_2) = \text{sg}(\rho) \cdot \nabla_\theta k_2 = \rho \cdot \left(-\log \frac{p}{q_\theta}\right) s_\theta = \rho s_\theta k_1 $$
$\nabla_\theta(\rho k_3)$:
$$ \nabla_\theta(\rho k_3) = \rho s_\theta k_3 + \rho \left(1-\frac{p}{q_\theta}\right) s_\theta = \rho s_\theta \left(k_3 + 1 - \frac{p}{q_\theta}\right) $$
代入 $k_3 = \frac{p}{q_\theta} - 1 - \log \frac{p}{q_\theta}$:
$$ k_3 + 1 - \frac{p}{q_\theta} = \left(\frac{p}{q_\theta} - 1 - \log \frac{p}{q_\theta}\right) + 1 - \frac{p}{q_\theta} = -\log \frac{p}{q_\theta} = k_1 $$
这里有个很关键的消去:
$$ \boxed{\nabla_\theta(\rho k_3) = \rho s_\theta k_1} $$
梯度期望与优化目标
利用 $\mathbb{E}_\mu[\rho \cdot f] = \mathbb{E}_{q_\theta}[f]$ 和 $\mathbb{E}_{q_\theta}[s_\theta] = 0$:
$\mathbb{E}_\mu[\nabla_\theta(\rho k_1)]$:
$$ \mathbb{E}_\mu[\rho s_\theta (k_1 + 1)] = \mathbb{E}_{q_\theta}[s_\theta k_1] + \underbrace{\mathbb{E}_{q_\theta}[s_\theta]}_{=0} = \nabla_\theta D_{\mathrm{KL}}(q_\theta \| p) \quad \checkmark $$
$\mathbb{E}_\mu[\nabla_\theta(\rho k_2)]$:
$$ \begin{aligned} \mathbb{E}_\mu[\rho s_\theta (k_2 + k_1)] &= \mathbb{E}_{q_\theta}[s_\theta k_2] + \mathbb{E}_{q_\theta}[s_\theta k_1] \\ &= \mathbb{E}_{q_\theta}[s_\theta k_2] + \mathbb{E}_{q_\theta}[\nabla_\theta k_2] && \text{(因为 } \nabla_\theta k_2 = k_1 s_\theta \text{)} \\ &= \nabla_\theta \mathbb{E}_{q_\theta}[k_2] && \text{(把 score-function 项与显式梯度项重新合并)} \end{aligned} $$
也就是说,$\rho k_2$ 的梯度期望对应的是”最小化 $\mathbb{E}_{q_\theta}[k_2]$”(一个与 KL 共享局部二阶行为的 surrogate),而不是反向 KL $D_{\mathrm{KL}}(q_\theta\|p)$ 的目标函数的真梯度。因此若目标是精确优化反向 KL,不建议直接使用 $\rho k_2$。(它与反向 KL 真梯度的差是 $\mathbb{E}_{q_\theta}[s_\theta k_2]$:在 $q_\theta \approx p$ 的邻域里是高阶小量,但离开该邻域后大小不受控。)
$\mathbb{E}_\mu[\nabla_\theta(\text{sg}(\rho) k_2)]$ 与 $\mathbb{E}_\mu[\nabla_\theta(\rho k_3)]$(两者的梯度随机变量同为 $\rho s_\theta k_1$):
$$ \mathbb{E}_\mu[\rho s_\theta k_1] = \mathbb{E}_{q_\theta}[s_\theta k_1] = \nabla_\theta D_{\mathrm{KL}}(q_\theta \| p) \quad \checkmark $$
梯度等价性:哪些方法产生相同的梯度随机变量
这一步也解释了为什么 $\text{sg}(\rho) k_2$ 与 $\rho k_3$ 常一起出现:对同一个样本 $x$,它们反传得到的梯度向量其实完全一样,都是 $\rho s_\theta k_1$。不只是期望相同,而是样本级一致;因此均值、方差和更高阶统计量也都一致。
| 损失项写法 | 梯度随机变量 | 梯度期望 | 对应的优化目标 |
|---|---|---|---|
| $\rho k_1$ | $\rho s_\theta (k_1+1)$ | $\nabla D_{\mathrm{KL}}(q_\theta \| p)$ | 反向 KL ✓ |
| $\rho k_2$ | $\rho s_\theta (k_2 + k_1)$ | $\nabla_\theta \mathbb{E}_{q_\theta}[k_2]$ | 局部二阶 surrogate(非反向 KL)✗ |
| $\text{sg}(\rho) k_2$ | $\rho s_\theta k_1$ | $\nabla D_{\mathrm{KL}}(q_\theta \| p)$ | 反向 KL ✓ |
| $\rho k_3$ | $\rho s_\theta k_1$ | $\nabla D_{\mathrm{KL}}(q_\theta \| p)$ | 反向 KL ✓ |
7.3 On-policy 与 Off-policy 的统一视角
有了上面这一步,再回头看 on-policy 和 off-policy 的关系就清楚多了。
On-policy($\mu = q_\theta$):
- $\rho = \frac{q_\theta}{\text{sg}(q_\theta)} \equiv 1$(数值恒为 1);
- $\rho k_1 = k_1$,$\rho k_2 = k_2$,$\rho k_3 = k_3$;
- 但梯度不同!因为 $\nabla_\theta \rho = s_\theta \neq 0$。
这解释了为什么 on-policy 下朴素直接反向传播(不显式构造 $\rho$)使用 $k_1$ 或 $k_3$ 作为损失会出问题:
- 直接用 $k_1$:相当于没有 $\rho$ 的版本,$\mathbb{E}_{q_\theta}[\nabla k_1] = \mathbb{E}_{q_\theta}[s_\theta] = 0$,完全无效;
- 直接用 $k_3$:相当于没有 $\rho$ 的版本,$\mathbb{E}_{q_\theta}[\nabla k_3] = \nabla D_{\mathrm{KL}}(p \| q_\theta)$(正向 KL),方向错误;
- 直接用 $k_2$:$\mathbb{E}_{q_\theta}[\nabla k_2] = \nabla D_{\mathrm{KL}}(q_\theta \| p)$(反向 KL)✓ 在这种朴素实现下是与目标一致的选择。
一个真实案例:GRPO 的原始目标(DeepSeekMath,式 3–4)加的正是这种朴素 on-policy 的 $k_3$ 可微损失项,在 verl 中对应
kl_loss_type=low_var_kl。按上面的分解,这一 KL 项的期望梯度指向的是正向 KL $D_{\mathrm{KL}}(p \| q_\theta)$,而不是目标里写的反向 KL——《Rethinking KL Regularization in RLHF》(Liu et al., 2025)与《A Comedy of Estimators》(Shah et al., 2025)等近期工作都指出了这一点。修复办法有两类:DeepSeek-V3.2 采用重要性比率修正 $\rho k_3$(见 7.4 节);verl 文档的k3+选项(数值取 $k_3$、梯度经 straight-through 走 $k_2$)是同一思路的另一种实现。
若显式构造 $\rho = \frac{q_\theta}{\text{sg}(q_\theta)}$(on-policy),或使用标准重要性权重 $\rho = \frac{q_\theta}{\mu}$(off-policy,$\mu \neq q_\theta$),则两种场景的结论完全相同:
- 可用:$\rho k_1$(方差高)、$\text{sg}(\rho) k_2$(推荐)、$\rho k_3$(推荐)——三者均给出反向 KL 梯度;
- 不宜直接用于精确优化反向 KL:$\rho k_2$($\rho$ 参与梯度)——它优化的是与 KL 局部二阶行为一致的 surrogate。
on-policy 下 $k_2$ 能直接奏效并不是一个可以外推的普遍现象,而是 $\rho \equiv 1$ 时的一种特殊退化:此时 $\nabla_\theta k_2 = k_1 s_\theta$,恰好落在正确的反向 KL 梯度上;这个结论不能直接外推到一般 off-policy 情形。
关于大模型 off-policy 场景的更深入分析,可参见我之前的博客:从两策略到三策略:LLM RL 中行为策略–参考策略不一致下的 TRPO 扩展。
7.4 方差分析
前面看到,给出反向 KL 无偏梯度的有三个选择:$\rho k_1$、$\text{sg}(\rho) k_2$、$\rho k_3$。它们的梯度随机变量分别为(注意 $s_\theta$ 是向量,因此梯度也是向量):
$$ g_1(x) = \rho(x) s_\theta(x) (k_1(x) + 1), \quad g_\star(x) = \rho(x) s_\theta(x) k_1(x) $$
其中 $g_\star$ 对应 $\text{sg}(\rho) k_2$ 和 $\rho k_3$(两者完全相同)。
为了避免”向量梯度的方差”这一表述的歧义,这里比较任意方向上的投影方差:取任意单位向量 $u$,定义标量随机变量
$$ g_1^{(u)} := u^\top g_1, \quad g_\star^{(u)} := u^\top g_\star. $$
令 $A_u(x) := \rho(x)\, u^\top s_\theta(x)$,$B(x) := k_1(x)$,则
$$ g_1^{(u)} = A_u(B+1), \quad g_\star^{(u)} = A_u B. $$
两者期望相同,且任意方向上的方差之差为
$$ \boxed{ \mathrm{Var}_\mu\big(g_1^{(u)}\big) - \mathrm{Var}_\mu\big(g_\star^{(u)}\big) = \mathbb{E}_\mu\big[A_u(x)^2 \big(2B(x)+1\big)\big] = \mathbb{E}_\mu\Big[\rho(x)^2\,\big(u^\top s_\theta(x)\big)^2\,\big(2k_1(x)+1\big)\Big]. } $$
在典型的 KL 惩罚场景下($q_\theta \approx p \approx \mu$),取 $\frac{p(x)}{q_\theta(x)} = 1 + \varepsilon(x)$,$|\varepsilon| \ll 1$:
- $k_1 = -\log \frac{p}{q_\theta} \approx -\varepsilon$
- $2k_1 + 1 \approx 1 - 2\varepsilon$,主导项为正的 $O(1)$ 常数
因此在足够小的邻域里,$\mathrm{Var}_\mu(g_1) > \mathrm{Var}_\mu(g_\star)$。
一旦离开这个小 KL 邻域,$2k_1+1$ 的符号就不再固定;此时整体比较还要结合 $\rho^2$ 与 score 项的加权来判断,不能再简单依赖这一局部展开。
直觉上:$g_1 = \rho s_\theta (k_1 + 1)$ 比 $g_\star = \rho s_\theta k_1$ 多带一个量级为 $O(1)$ 的零均值噪声项 $\rho s_\theta$,而 $g_\star$ 只剩与 $\varepsilon$ 成正比的一阶小量——这就是 $\rho k_1$ 在典型小 KL 场景里通常更吵的原因。
实践建议:若优化反向 KL,首选 $\rho k_3$ 或 $\text{sg}(\rho) k_2$(两者梯度等价且方差低);$\rho k_1$ 虽然无偏但方差较高,可作备选,并需配合 clipping / 正则化。
极度 off-policy 时的警示:
当 $\mu$ 与 $q_\theta$ 差异很大时——例如 $\mu$ 在 $q_\theta$ 的高密度区域几乎没有采样,或 $\rho = q_\theta / \mu$ 在尾部爆炸——任何基于 $\rho$ 的方法都会遇到严重的方差问题。此时 $\rho k_3$(或 $\text{sg}(\rho) k_2$)相对于 $\rho k_1$ 的优势就不再有理论保证,需要结合 clipping、正则化等手段综合处理。
在通常假设的近策略更新设定里——KL 受控、采样自近邻策略 $\mu = q_{\theta_\text{old}}$——上面的实践建议可以放心使用。与本文的分析一致,DeepSeek-V3.2 技术报告采用 $\frac{q_\theta}{\mu} k_3$ 作为 off-policy KL 惩罚的估计器:在本文记号下这正是 $\rho k_3$,同时恢复了无偏 KL 数值估计和正确的反向 KL 梯度——用本文的语言说,恰好修复了 GRPO 式目标里那个朴素 $k_3$ 损失项。

梯度分析总览表
统一框架下各估计器对应的梯度目标如下:
| 采样类型 | Loss | $\nabla_\theta$ Loss 的期望 | 对应的优化目标 | 能否用于优化反向 KL? |
|---|---|---|---|---|
| on/off-policy | $\rho k_1$ | $\nabla_\theta D_{\mathrm{KL}}(q_\theta \| p)$ | 反向 KL | ✓(但方差较高) |
| on/off-policy | $\rho k_2$ | $\nabla_\theta \mathbb{E}_{q_\theta}[k_2]$ | 局部二阶 surrogate(非反向 KL) | ✗ |
| on/off-policy | $\text{sg}(\rho) k_2$ | $\nabla_\theta D_{\mathrm{KL}}(q_\theta \| p)$ | 反向 KL | ✓(推荐,低方差) |
| on/off-policy | $\rho k_3$ | $\nabla_\theta D_{\mathrm{KL}}(q_\theta \| p)$ | 反向 KL | ✓(推荐,低方差) |
其中 $\rho = \frac{q_\theta}{\text{sg}(\mu)}$。当 on-policy($\mu = q_\theta$)时,$\rho \equiv 1$。
这里要特别强调:上表的结论针对的是”loss 写成 $L=\rho\,k$ 且 $\rho$ 在计算图中保留梯度路径”的统一框架。on-policy 时数值上 $\rho\equiv 1$,但 $\nabla_\theta\rho=s_\theta\neq 0$——因此 $\rho k$ 与”直接对 $k$ 的样本均值反向传播”并不是同一个梯度。一旦丢掉显式的 $\rho$,就退回 7.3 节开头的朴素结论:$k_1$ 无效、$k_2$ 反向 KL、$k_3$ 正向 KL。
8. 作为奖励塑形项时的梯度分析
这里是最容易掉的坑:既然 $k_1$ 和 $k_3$ 对反向 KL 的数值估计都无偏,那把它们加上 stop-gradient 放进奖励塑形里,是不是也应该没问题?
答案是否定的。数值无偏推不出放进 reward 后梯度仍然正确:一旦 KL 变成 shaped reward 的一部分,真正进入优化的是 $\mathbb{E}[s_\theta \hat{k}]$,而不是 $\mathbb{E}[\hat{k}]$ 本身。
8.1 真正的 KL 正则化策略梯度
考虑 KL 正则化的强化学习目标:
$$ J(\theta) = \mathbb{E}_{q_\theta}[R] - \beta \cdot D_{\mathrm{KL}}(q_\theta \| p) $$
其目标函数的真梯度为:
$$ \nabla_\theta J = \mathbb{E}_{q_\theta}[s_\theta \cdot R] - \beta \cdot \nabla_\theta D_{\mathrm{KL}}(q_\theta \| p) $$
利用前文「准备工作」章节的结论,反向 KL 的梯度为:
$$ \nabla_\theta D_{\mathrm{KL}}(q_\theta \| p) = \mathbb{E}_{q_\theta}\left[s_\theta \cdot \left(-\log \frac{p}{q_\theta}\right)\right] = \mathbb{E}_{q_\theta}[s_\theta \cdot k_1] $$
因此,真正的 KL 正则化策略梯度是:
$$ \nabla_\theta J = \mathbb{E}_{q_\theta}\left[s_\theta \cdot \left(R - \beta \cdot k_1\right)\right] $$
使用估计器 $\hat{k}$ 时的梯度形式
下文只讨论策略梯度主项本身,暂不把 baseline、critic 拟合误差、GAE 与额外归一化一并纳入。此时若把某个估计器 $\hat{k}$(加 stop-gradient)放进奖励塑形,塑形后的奖励为 $\tilde{R} = R - \beta \cdot \text{sg}(\hat{k})$,策略梯度变为:
$$ \nabla_\theta \tilde{J} = \mathbb{E}_{q_\theta}\left[s_\theta \cdot (R - \beta \cdot \hat{k})\right] $$
在该主项分析下,无偏条件是:$\nabla_\theta \tilde{J} = \nabla_\theta J$ 当且仅当
$$ \mathbb{E}_{q_\theta}[s_\theta \cdot \hat{k}] = \mathbb{E}_{q_\theta}[s_\theta \cdot k_1] $$
使用 $k_1$ 作为惩罚:梯度无偏
当 $\hat{k} = k_1$ 时,条件自动成立:
$$ \mathbb{E}_{q_\theta}[s_\theta \cdot k_1] = \mathbb{E}_{q_\theta}[s_\theta \cdot k_1] \quad \checkmark $$
所以就该策略梯度主项而言,把 $k_1$ 放进奖励塑形诱导的是无偏梯度。这正是 InstructGPT 一脉 RLHF 流水线里经典的 per-token KL reward 写法。
使用 $k_3$ 作为惩罚:梯度有偏
当 $\hat{k} = k_3 = \frac{p}{q_\theta} - 1 - \log \frac{p}{q_\theta}$ 时:
$$ \mathbb{E}_{q_\theta}[s_\theta \cdot k_3] = \mathbb{E}_{q_\theta}\left[s_\theta \cdot \left(\frac{p}{q_\theta} - 1\right)\right] + \mathbb{E}_{q_\theta}\left[s_\theta \cdot \left(-\log \frac{p}{q_\theta}\right)\right] $$
第二项正是 $\mathbb{E}_{q_\theta}[s_\theta \cdot k_1]$。问题出在第一项:
$$ \mathbb{E}_{q_\theta}\left[s_\theta \cdot \left(\frac{p}{q_\theta} - 1\right)\right] = \mathbb{E}_{q_\theta}\left[s_\theta \cdot \frac{p}{q_\theta}\right] - \underbrace{\mathbb{E}_{q_\theta}[s_\theta]}_{=0} = \mathbb{E}_{q_\theta}\left[s_\theta \cdot \frac{p}{q_\theta}\right] $$
而这个量可以改写为:
$$ \mathbb{E}_{q_\theta}\left[s_\theta \cdot \frac{p}{q_\theta}\right] = \int q_\theta(x) \cdot \nabla_\theta \log q_\theta(x) \cdot \frac{p(x)}{q_\theta(x)} dx = \int p(x) \cdot \nabla_\theta \log q_\theta(x) dx = \mathbb{E}_p[s_\theta] $$
利用正向 KL 的梯度公式 $\nabla_\theta D_{\mathrm{KL}}(p \| q_\theta) = -\mathbb{E}_p[s_\theta]$,有:
$$ \mathbb{E}_{q_\theta}\left[s_\theta \cdot \frac{p}{q_\theta}\right] = -\nabla_\theta D_{\mathrm{KL}}(p \| q_\theta) $$
因此:
$$ \mathbb{E}_{q_\theta}[s_\theta \cdot k_3] = \underbrace{-\nabla_\theta D_{\mathrm{KL}}(p \| q_\theta)}_{\text{偏差项}} + \nabla_\theta D_{\mathrm{KL}}(q_\theta \| p) $$
把 $k_3$ 放进奖励塑形时,梯度是有偏的,偏差项正好等于正向 KL 梯度的负值。
不妨把这个偏差项当成一个目标函数来读。由上面的分解,KL 惩罚对上升方向的贡献为
$$ -\beta\,\mathbb{E}_{q_\theta}[s_\theta \cdot k_3] = -\beta\,\nabla_\theta\left[D_{\mathrm{KL}}(q_\theta \| p) - D_{\mathrm{KL}}(p \| q_\theta)\right], $$
即真正被最小化的”惩罚”是差值 $D_{\mathrm{KL}}(q_\theta \| p) - D_{\mathrm{KL}}(p \| q_\theta)$。它不是散度,而且没有下界。两个高斯例子能把危险讲得很具体(取 $q_\theta = \mathcal{N}(\theta, \sigma_q^2)$,$p = \mathcal{N}(m, \sigma_p^2)$,两个方向的 KL 梯度沿均值方向分别为 $(\theta-m)/\sigma_p^2$ 与 $(\theta-m)/\sigma_q^2$):
- 抵消与反号:等方差($\sigma_q = \sigma_p$)时两个梯度恰好相等、完全抵消,KL 部分的期望更新严格为零——惩罚悄无声息地失效,尽管测出来的 KL 数值既正确又为正;参考策略更宽($\sigma_p > \sigma_q$)时更糟,差值梯度 $(\theta-m)\left(\sigma_p^{-2} - \sigma_q^{-2}\right)$ 与真实反向 KL 梯度反号,把策略均值推离参考策略。
- 塌缩激励:等均值、$\sigma_q \to 0$ 时,惩罚 $D_{\mathrm{KL}}(q_\theta \| p) - D_{\mathrm{KL}}(p \| q_\theta) = 2\log\frac{\sigma_p}{\sigma_q} + \frac{\sigma_q^2}{2\sigma_p^2} - \frac{\sigma_p^2}{2\sigma_q^2}$ 被 $-\frac{\sigma_p^2}{2\sigma_q^2}$ 主导而趋于 $-\infty$——更新反而在奖励策略塌缩到 $p$ 的众数上。
这一结论完全来自梯度分解本身,不依赖任何具体实验设定。
使用 $k_2$ 作为惩罚:同样有偏
当 $\hat{k} = k_2 = \frac{1}{2}k_1^2$ 时,奖励塑形项对应的梯度项为
$$ \mathbb{E}_{q_\theta}[s_\theta \cdot k_2] = \frac{1}{2}\mathbb{E}_{q_\theta}[s_\theta \cdot k_1^2], $$
它一般不等于 $\mathbb{E}_{q_\theta}[s_\theta \cdot k_1]$。所以把 $k_2$ 放进奖励塑形时同样会诱导出有偏的策略梯度。
Off-policy 场景下的结论
上述分析假设 on-policy 采样。换到 off-policy 场景,结论会变吗?
设样本来自行为策略 $\mu$,采用重要性加权的策略梯度:
$$ \nabla_\theta \tilde{J} = \mathbb{E}_\mu\left[\frac{q_\theta}{\mu} \cdot s_\theta \cdot (R - \beta \cdot k)\right] $$
利用 $\mathbb{E}_\mu[\frac{q_\theta}{\mu} \cdot f] = \mathbb{E}_{q_\theta}[f]$,上式等于:
$$ = \mathbb{E}_{q_\theta}[s_\theta \cdot R] - \beta \cdot \mathbb{E}_{q_\theta}[s_\theta \cdot k] $$
无偏条件仍然是 $\mathbb{E}_{q_\theta}[s_\theta \cdot k] = \mathbb{E}_{q_\theta}[s_\theta \cdot k_1]$,与 on-policy 完全一致。
这里要单独强调一点:在本文关注的当前样本 / 当前 token 级 off-policy 策略梯度主项里,重要性权重 $\frac{q_\theta}{\mu}$ 作用在整个策略梯度估计器上,不需要再对 shaped reward 中的 KL 估计器额外乘一层权重。因此:
- Shaped reward 保持原形式:$\tilde{R} = R - \beta \cdot k_1$(而不是 $R - \beta \cdot \frac{q_\theta}{\mu} k_1$);
- 在本文讨论的 stop-grad reward shaping($\tilde{R}=R-\beta\,\text{sg}(k)$)、目标为 反向 KL 正则 的设定下:结论和 on-policy 的策略梯度主项相同,只有 $k_1$ 能保证梯度主项无偏。
注:这里默认的是当前样本 / 当前 token 级的 reward shaping 写法;若回到一般多步 MDP 的严格 off-policy 推导,还需要配合逐步重要性采样或相应的值函数修正。另一个实现层面的注意点:实际流水线通常在 rollout 时用 $\mu$ 的 logprob 一次性算好 reward 里的 KL,并在多个梯度 epoch 内冻结;严格说此时 KL 部分的更新对应的是 $\nabla_\theta\left[D_{\mathrm{KL}}(q_\theta \| p) - D_{\mathrm{KL}}(q_\theta \| \mu)\right]$,而非纯粹的反向 KL 梯度。单 epoch($\mu = q_\theta$)时两者一致。
8.2 这一节的结论:只有 $k_1$ 保持无偏
| 估计器 | 数值无偏? | 作为奖励塑形项时梯度主项无偏? | 实际表现 |
|---|---|---|---|
| $k_1$ | ✓ | ✓ | 稳定 |
| $k_2$ | ✗ | ✗ | 不建议 |
| $k_3$ | ✓ | ✗ | 显著不稳定 |
回头看,评价 KL 估计器时,”数值无偏”和”梯度正确”其实是两个独立维度。就本文讨论的奖励塑形写法(stop-grad reward shaping,目标是反向 KL 正则;无论 on-policy 还是 off-policy)而言,就策略梯度主项来说,只有 $k_1$ 满足目标要求。$k_3$ 虽然数值无偏且方差更低,但放进奖励塑形后会导致梯度有偏,实践里也确实更容易不稳定——《A Comedy of Estimators》(Shah et al., 2025)的系统实验给出的正是这一模式:梯度有偏的估计器配置更容易训练不稳,梯度无偏的配置表现更好。
补充说明:一旦把 learned critic、GAE、baseline 归一化等实现细节都考虑进来,实际更新中的偏差分析会复杂得多。本节结论刻意只聚焦在 policy-gradient 主项,就是为了避免把不同来源的偏差混在一起。
到这里容易产生一个”表面矛盾”:奖励塑形里只许用 $k_1$,损失项里却推荐 $\rho k_3$ 或 $\text{sg}(\rho)k_2$。下一节解释两者并不冲突:就 KL 正则项贡献的梯度随机变量而言,它们可以做到样本级完全等价;真正的差异在于 KL 是否进入 advantage / baseline,以及信用分配(credit assignment)的路径。
8.3 $k_1$ 奖励塑形与低方差 KL 损失项:等价性与差异
说到这里,很容易追问一句:KL 写进 loss 和 KL 写进 reward,到底在什么意义上等价,又在什么意义上不是一回事?
KL 梯度项的样本级等价性
这里说的”等价”只限于 KL 正则对应的那一项梯度随机变量;一旦把 learned critic、baseline、GAE、batch 中心化一并算进来,整体更新语义就会分叉。本节统一写成 policy gradient 的上升方向 $\nabla_\theta J$(代码里最小化 loss 只差一个全局负号),并沿用统一记号:样本来自 $x\sim\mu$,权重 $\rho=\frac{q_\theta}{\text{sg}(\mu)}$ 作用在策略梯度估计器上。
前文已证明,低方差 KL 损失项($\text{sg}(\rho) k_2$ 或 $\rho k_3$)反传的梯度随机变量是 $\rho s_\theta k_1$,带上惩罚系数即 $-\beta \cdot \rho s_\theta k_1$;而 $k_1$ 奖励塑形($\tilde{R} = R - \beta \cdot k_1$,对 $k_1$ 做 stop-gradient 只是避免 KL 直接反传,不改变惩罚数值)在策略梯度项里贡献的是 $\rho s_\theta \cdot (-\beta k_1) = -\beta \cdot \rho s_\theta k_1$。
这就是 8.1 / 8.2 节与第 7 章看似在推荐不同写法、实际并不冲突的原因:两条路线的 KL 梯度项是同一个随机变量——逐样本相同,因此期望与方差也都相同。
整体更新语义的差异
虽然 KL 梯度项在样本级等价,两种写法的整体更新语义仍然不同。差异主要体现在以下几个方面:
1. KL 是否进入 Advantage / Baseline
KL 作为损失项(等价于最大化 $J(\theta)=\mathbb{E}[R]-\beta\,\mathrm{KL}$,但把 KL 项作为一个独立、可控的”显式力”来实现):
$$ \nabla_\theta J_{\text{loss-impl}} = \underbrace{\mathbb{E}_\mu[\rho s_\theta A_{\text{env}}]}_{\text{RL 上升方向}} + \underbrace{(-\beta) \cdot \mathbb{E}_\mu[\rho s_\theta k_1]}_{\text{独立的 KL 惩罚上升方向}} $$
KL 是一个独立的正则项,与 advantage 完全解耦。KL 梯度的大小只取决于 $k_1$ 本身,不受 critic 质量或 baseline 选择的影响。
KL 作为奖励塑形项:
$$ \nabla_\theta J_{\text{reward-impl}} = \mathbb{E}_\mu[\rho s_\theta \tilde{A}], \quad \tilde{A} \text{ 基于 } (R - \beta \cdot k_1) $$
KL 通过 shaped reward 进入 advantage 计算,会被 baseline 处理。这意味着:
- KL 的影响会被 advantage 的构造方式调制;
- 如果使用 value function baseline,KL 的影响会被部分吸收。
从实现角度看,这里的差别可以理解为:Loss 方案把”环境回报部分”和”KL 正则部分”分开估计;Reward 方案把 KL 视为回报的一部分,所以它会跟着你对回报做的所有处理(baseline、归一化、截断等)一起走。
2. 信用分配:独立正则力 vs 混入 Shaped Reward
KL 作为损失项:每个 token / state 的 KL 梯度是”局部”的,只影响该位置的策略更新。
KL 作为奖励塑形项:KL 惩罚通过 return / advantage 的时间回传,可能影响到更早的决策。
3. Reward 中心化 KL:对梯度无偏性的影响
在大模型 RL(如 GRPO、PPO for LLM)中,常见的 advantage 算法是 $A = r - \text{mean}(r)$。当 KL 作为奖励塑形项时,是否把 KL 也纳入 mean 会影响梯度的无偏性。
设采样 $x_1,\dots,x_n \overset{iid}{\sim} q_\theta$,记 $g_i = \nabla_\theta \log q_\theta(x_i)$,并用 $\mathrm{kl}_i$ 表示第 $i$ 个样本的 KL 惩罚标量,$\bar{\mathrm{kl}} = \frac{1}{n}\sum_j \mathrm{kl}_j$。
不中心化($-\beta\,\mathrm{kl}_i$):KL 梯度项的期望为
$$ -\beta \mathbb{E}[g_i\,\mathrm{kl}_i] = -\beta \nabla_\theta \mathbb{E}[\mathrm{KL}] $$
这是对 $-\beta \mathbb{E}[\mathrm{KL}]$ 的无偏梯度。
同 batch 均值中心化($-\beta(\mathrm{kl}_i - \bar{\mathrm{kl}})$,含自身):由于 $\bar{\mathrm{kl}}$ 依赖所有样本(包括 $x_i$ 自身),期望梯度变为
$$ -\beta \left(1 - \frac{1}{n}\right) \nabla_\theta \mathbb{E}[\mathrm{KL}] $$
即 KL 正则梯度被缩小了 $\frac{1}{n}$,等价于有效 $\beta$ 变小。这不是严格无偏的。
Leave-one-out 中心化($-\beta(\mathrm{kl}_i - \bar{\mathrm{kl}}_{-i})$):若改用 $\bar{\mathrm{kl}}_{-i} = \frac{1}{n-1}\sum_{j \neq i} \mathrm{kl}_j$,则 $\bar{\mathrm{kl}}_{-i}$ 与 $g_i$ 独立,有 $\mathbb{E}[g_i \bar{\mathrm{kl}}_{-i}] = 0$,因此
$$ -\beta \mathbb{E}[g_i (\mathrm{kl}_i - \bar{\mathrm{kl}}_{-i})] = -\beta \nabla_\theta \mathbb{E}[\mathrm{KL}] $$
仍是无偏梯度,同时享受中心化带来的方差缩减。
结论:同 batch 均值中心化引入的偏差为 $O(1/n)$,在 GRPO 等大 batch 场景下影响很小;若追求严格无偏,可改用 leave-one-out 均值,还能享受方差缩减。
何时选择哪种方式?
| 维度 | KL 作为损失项 | KL 作为奖励塑形项 |
|---|---|---|
| KL 梯度形态 | $\rho s_\theta k_1$(低方差选择) | $\rho s_\theta k_1$ |
| 与 Advantage | 完全解耦 | 通过 shaped reward 耦合 |
| KL 中心化 | 无(绝对惩罚) | 有($\text{KL} - \text{mean}(\text{KL})$) |
| 信用分配 | 局部、per-token | 可能有时间回传(取决于实现) |
| 适用场景 | 希望 KL 作为显式正则项单独控制 | 希望 KL 随 shaped reward 一起进入 advantage / return |
实践建议:想让 KL 作为显式正则项单独控制(少受 advantage 构造与 critic / baseline 质量影响),就写进 loss,用 $\text{sg}(\rho) k_2$ 或 $\rho k_3$——on-policy 不想显式构造 $\rho$ 时,直接用 $k_2$ 最简单也最不易出错;想让 KL 随 shaped reward 一起进入 advantage / return(接受与 baseline、信用分配路径耦合),就写进 reward,用 $k_1$。
基于上面”数值无偏 vs 梯度正确”以及”Loss 与 Reward 实现差异”的结论,最后把真实代码里最常见的几个陷阱单独列出来。
9. 常见陷阱
- On-policy 下用 $k_1 = \log \frac{q_\theta}{p}$ 作为损失项:梯度期望为零,完全无效。
- On-policy 下用 $k_3 = \frac{p}{q_\theta} - 1 - \log \frac{p}{q_\theta}$ 作为损失项来优化反向 KL:若目标是反向 KL,其梯度实际对应的是正向 KL $D_{\mathrm{KL}}(p \| q_\theta)$。这正是 GRPO 原始目标里 KL 项的写法。
- Off-policy 下用 $\frac{q_\theta}{\mu} k_2$(重要性权重不 detach):梯度对应一个只在局部二阶行为上与 KL 一致的 surrogate,而非反向 KL。
- 在奖励塑形项里使用 $k_3$:虽然数值无偏,但诱导的策略梯度有偏,会额外引入并非目标反向 KL 的梯度项。
- On-policy 时把 $\rho$ 简单设为常数 1:必须显式构造 $\rho = \frac{q_\theta}{\text{sg}(q_\theta)}$(或等价地 $\exp(\log q_\theta - \text{sg}(\log q_\theta))$),否则会丢掉 score-function 梯度路径,使 $\rho k_1$ 和 $\rho k_3$ 退化为朴素形式,不再对应前文的无偏结论。
- 混淆”数值无偏”与”梯度正确”:$k_3$ 对反向 KL 数值无偏,但作为奖励塑形项时诱导的策略梯度有偏;选择估计器时必须同时考虑这两个维度。
10. 总结
如果只记住四句话,可以记这四句:
- 数值无偏不等于梯度正确。 选 KL 估计器时,不仅要看它把 KL 数值估得准不准,还要看它在你的具体写法里到底在优化谁。
- 若把 KL 写成可微损失项:on-policy 的朴素实现直接用 $k_2$ 最省心;若显式构造 $\rho$,或本来就是 off-policy,则推荐 $\rho k_3$ 或 $\mathrm{sg}(\rho)k_2$。
- 若把 KL 写成 stop-grad reward shaping:在本文讨论的策略梯度主项里,只有 $k_1$ 能保持与反向 KL 正则一致的无偏梯度。
- 低方差 KL loss 与 $k_1$ in reward 在 KL 那一项上可以样本级等价,但整体算法语义并不相同。 前者把 KL 当作独立正则项;后者会把 KL 带进 advantage、baseline 和信用分配路径里。
相关文章
参考文献
- Dibya Ghosh. “KL Divergence for Machine Learning”. https://dibyaghosh.com/blog/probability/kldivergence
- John Schulman. “Approximating KL Divergence”. https://joschu.net/blog/kl-approx.html
- Verl Documentation. “Proximal Policy Optimization (PPO)”. https://verl.readthedocs.io/en/latest/algo/ppo.html
- 初七123334. “RLHF/RLVR 训练中的 KL 近似方法浅析(k1 / k2 / k3)”. https://zhuanlan.zhihu.com/p/1966872846212010437
- Kezhao Liu, Jason Klein Liu, Mingtao Chen, Yiming Liu. “Rethinking KL Regularization in RLHF: From Value Estimation to Gradient Optimization”. arXiv:2510.01555. https://arxiv.org/abs/2510.01555
- Yifan Zhang, Yifeng Liu, Huizhuo Yuan, Yang Yuan, Quanquan Gu, Andrew Chi-Chih Yao. “On the Design of KL-Regularized Policy Gradient Algorithms for LLM Reasoning”. arXiv:2505.17508. https://arxiv.org/abs/2505.17508
- Vedant Shah, Johan Obando-Ceron, Vineet Jain, Brian Bartoldson, Bhavya Kailkhura, Sarthak Mittal, Glen Berseth, Pablo Samuel Castro, Yoshua Bengio, Nikolay Malkin, Moksh Jain, Siddarth Venkatraman, Aaron Courville. “A Comedy of Estimators: On KL Regularization in RL Training of LLMs”. arXiv:2512.21852. https://arxiv.org/abs/2512.21852
- Zhihong Shao, Peiyi Wang, Qihao Zhu, et al. “DeepSeekMath: Pushing the Limits of Mathematical Reasoning in Open Language Models”. arXiv:2402.03300. https://arxiv.org/abs/2402.03300
- Long Ouyang, Jeff Wu, Xu Jiang, et al. “Training Language Models to Follow Instructions with Human Feedback”. arXiv:2203.02155. https://arxiv.org/abs/2203.02155
- DeepSeek-AI. “DeepSeek-V3.2: Pushing the Frontier of Open Large Language Models”. arXiv:2512.02556. https://arxiv.org/abs/2512.02556